KUKA机器人配置详述:从启动到存档路径设置
版权申诉
33 浏览量
更新于2024-07-03
收藏 2.44MB PDF 举报
这份名为《KUKA配置顺序详细步骤》的文档详细介绍了KUKA机器人系统的配置过程,主要包括以下几个关键步骤:
1. **系统初始化GHOST**:
- 在机器人上电后,首先进行系统原始的GHOST操作,目的是备份当前硬盘分区至D:/ghost/original.gho。用户需在D盘新建一个名为"ghost"的文件夹,并插入GHOST引导盘。通过BIOS设置将系统启动顺序改为从CD-ROM优先启动,重启后执行GHOST中文向导,选择分区到镜像功能。
2. **安装Setup-CD**:
- GHOST备份后,重启机器人,按住Ctrl键阻止KRC启动。在D盘新建"安装软件"文件夹,将Setup-CD中的所有文件复制进去,用于后续的软件安装。
3. **设置机器人基本信息**:
- 进入expert模式后,选择setup——robotdata,设置机器人名称(如UBR041),确保型号信息与机器人实际型号一致,确认后保存设置。
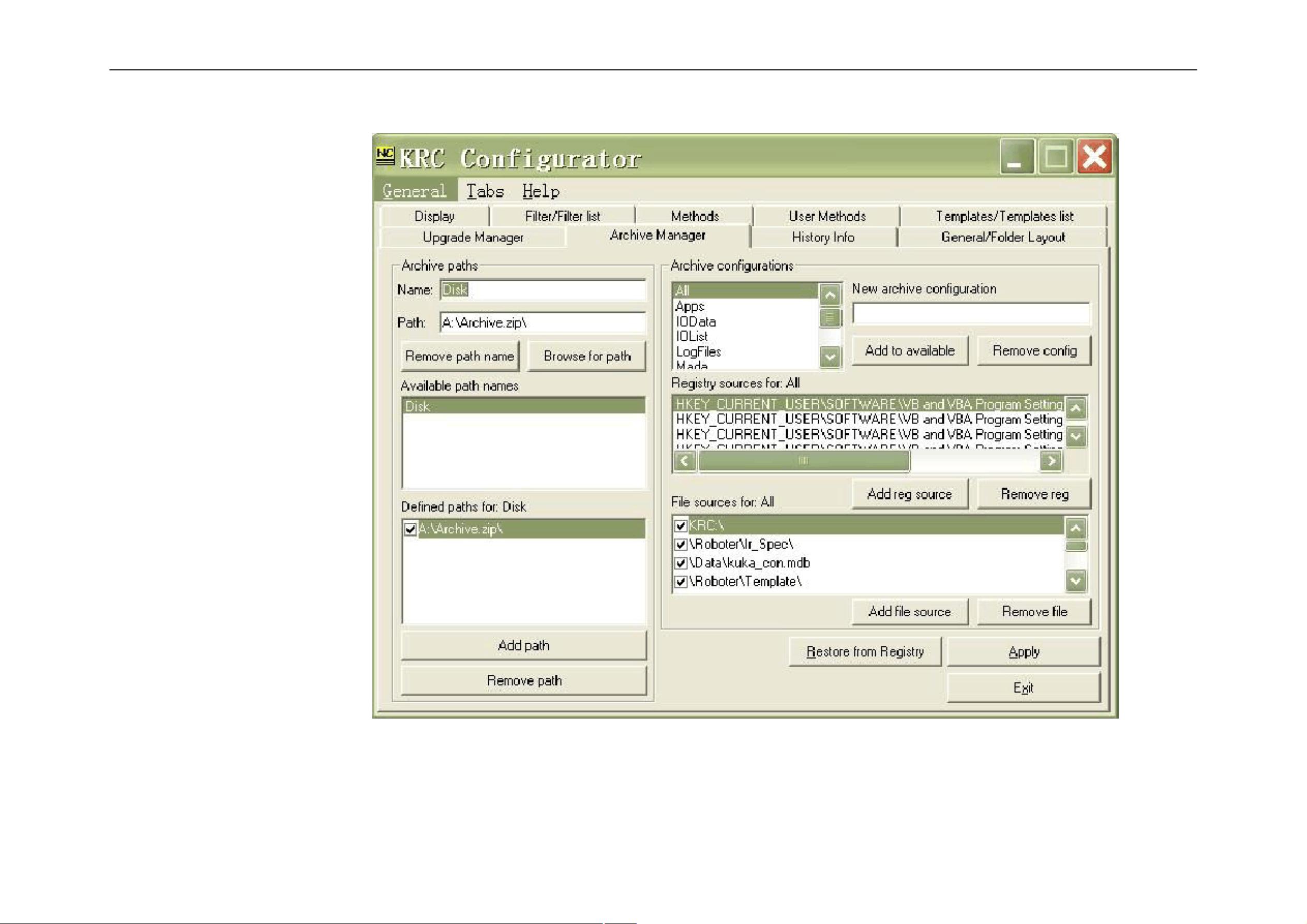
4. **设置存档和恢复路径**:
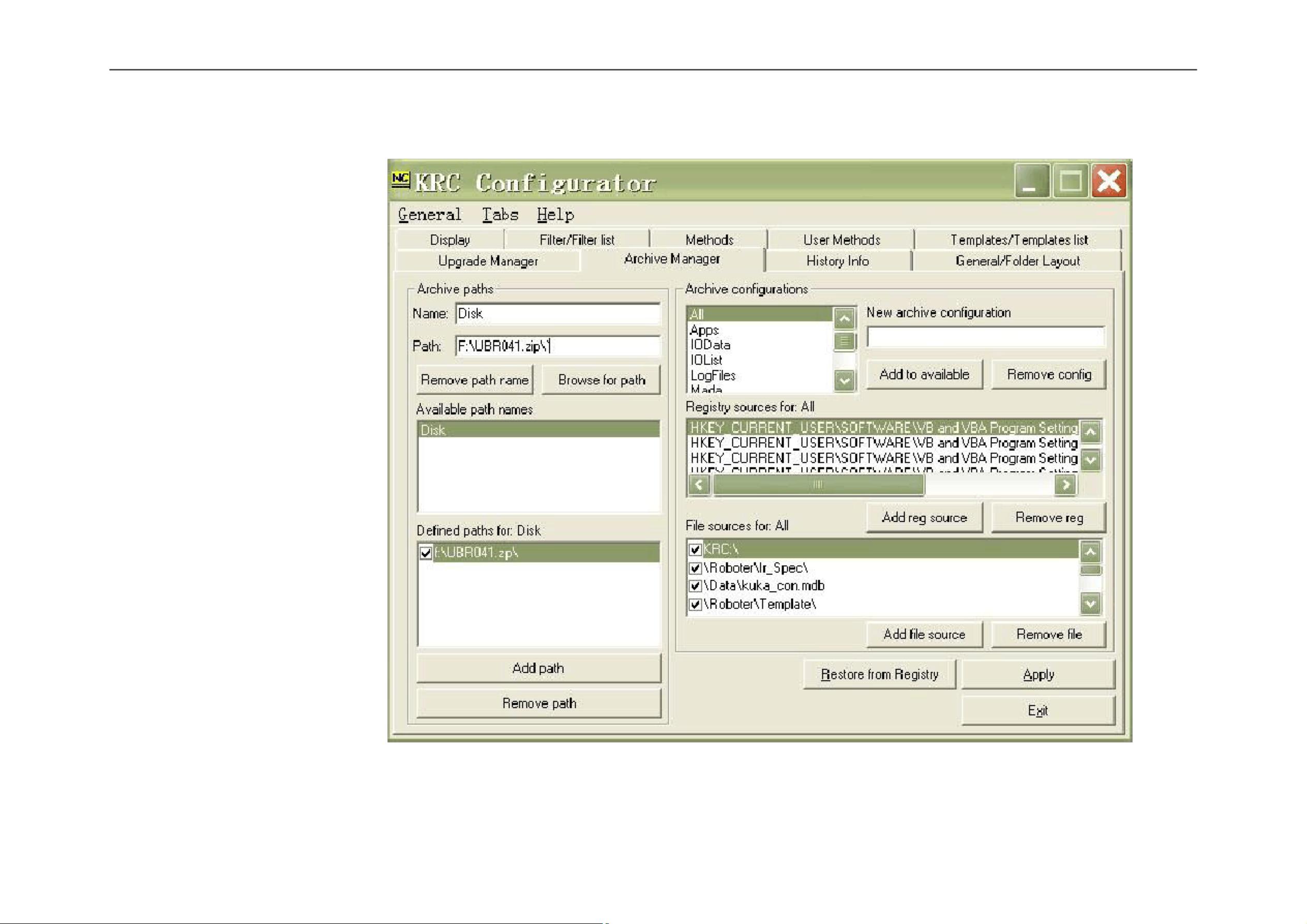
- 通过Ctrl+Esc进入Windows界面,打开KRCCONFIGURATOR文件夹,双击KrcConfigurator执行归档管理。按照提示修改归档文件名称(如与机器人名称对应),并调整其他相关设置,如U盘路径,确保所有设置正确无误。
5. **FirstMastering(首次校准)**:
- 在进行FirstMastering前,确保各轴位于机械零点位置,通常会有一个白色标记作为参考。初始时,轴1向上移动,从"+"至"-"逐根轴调整,特别是需要校正的轴。
这些步骤确保了KUKA机器人的系统初始化、硬件配置及必要的校准工作,对于初次接触或需要对现有配置进行更新的用户来说,具有很高的实用价值。每个环节都需要严格按照指示操作,以保证机器人运行的稳定性和准确性。
4.利用 Tab键可以在各个窗口间切换,切换到相应窗口修改(例如上面例子中机器人名称为UBR041,我们在设置机器人归档文件名称时也用一样的文件名),
Page 5
剩余25页未读,继续阅读
2022-06-18 上传
2022-06-18 上传
2022-06-18 上传
2022-06-18 上传
2022-06-18 上传
2022-06-18 上传

sinat_40572875
- 粉丝: 62
- 资源: 7万+
 我的内容管理
展开
我的内容管理
展开







