KUKA机器人手动示教操作指南
版权申诉
51 浏览量
更新于2024-06-21
收藏 18.05MB DOCX 举报
"KUKA机器人手动示教对模操作规程V1.0"
在工业自动化领域,KUKA机器人广泛应用于各种生产线,如热压机和成型机等。本规程详细介绍了如何安全有效地对手动示教对模进行操作。手动示教是编程的一种方式,允许操作员直接引导机器人到达目标位置并记录这些点,以便机器人后续能够自动重复这些动作。
首先,操作前必须确保所有设备的急停报警已复位,这是确保安全的基础。接着,启动机器人并等待示教器屏幕显示系统警告“全部运行开通”。此时,需要将示教器模式切换到“EXT”(外部控制模式)。
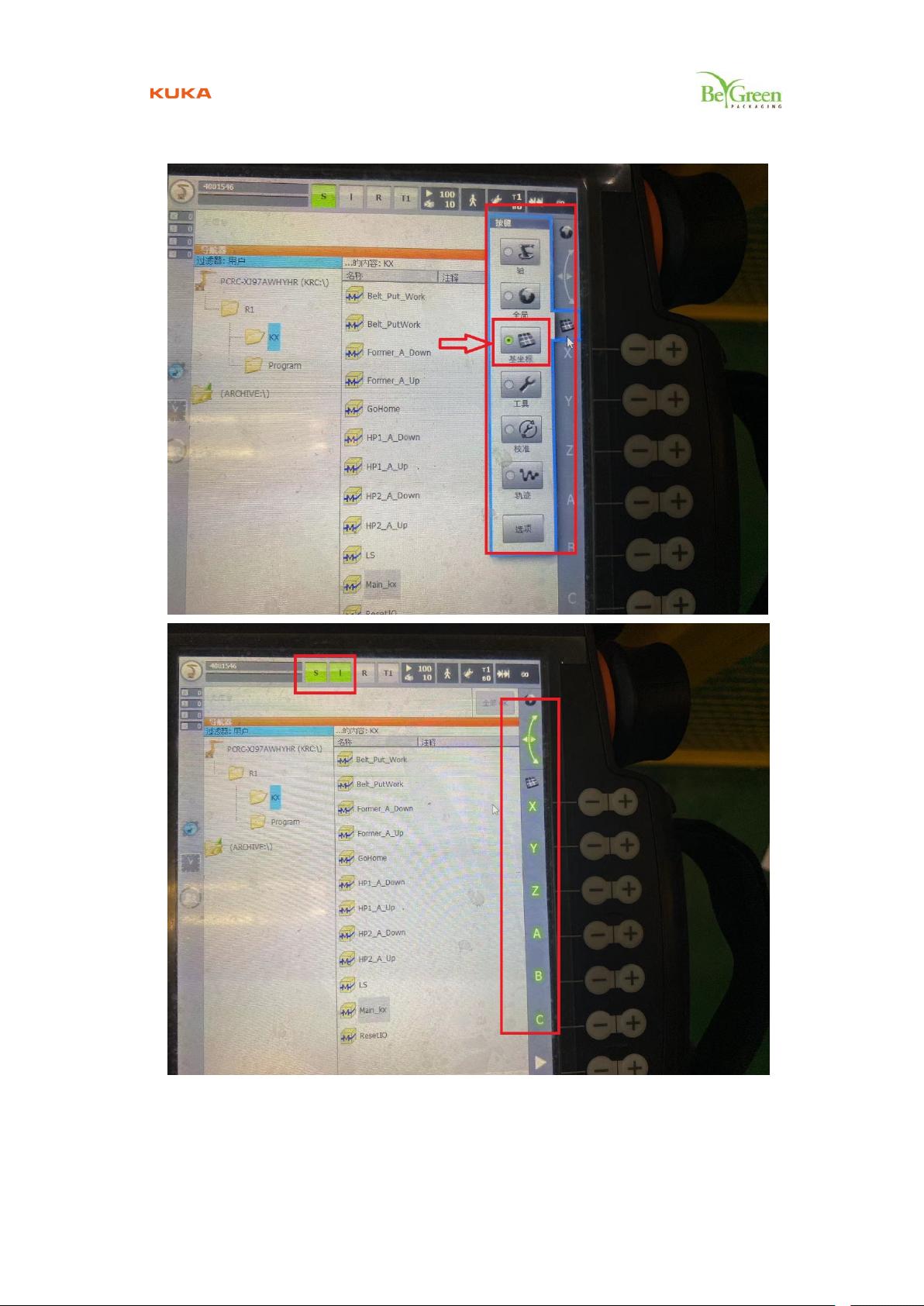
然后,通过主控台激活“机器人预约使能”,在示教器上观察“S”、“I”、“EXT”图标变绿,这表明机器人已准备好接受控制。再将模式切换到“T1”(手动单步模式),这时,按下使能开关,"S"和"I"图标继续保持绿色,各轴名称也将高亮显示。
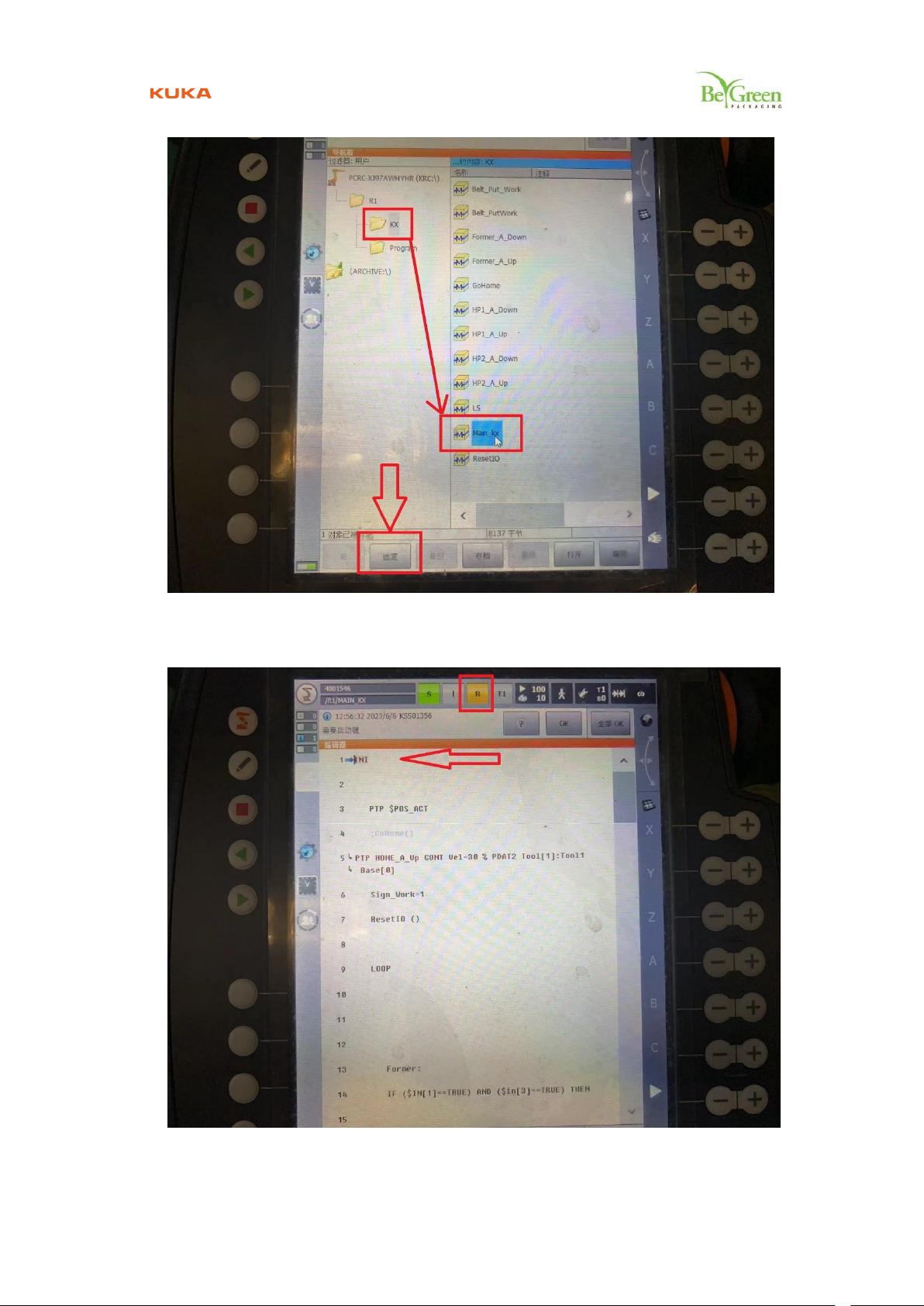
在进行手动示教时,可以通过选择基坐标或工具坐标来移动机器人。若选择基坐标,按下使能开关后,X、Y、Z、A、B、C轴会被高亮显示。要进入主程序,需参照点位标识中英文对照表找到主程序Main_kx,并点击“选定”进入。
在主程序中,将光标移动到PTP$POS_ACT行,选择“语句行选择”,以便执行此点位。调整运行倍率和手动示教倍率,可以使用倍率调节图标或示教器右下角的按钮。选择“动作”作为动作类型,按下使能开关并保持,再按下“启动键”开始执行指令。
如果在执行过程中遇到错误,需要将机器人移至Home原点。找到回原点指令PTPHOME_A_UpVel=100%PDAT2Tool[1]:Tool1Base[0],选中后按使能开关和“启动键”。当示教器显示“已达BCO”并“R”图标变红,表示已回到原点。
继续执行会进入Former_A_Up子程序,这是成型机的子程序,包含了上料和下料的动作。在整个过程中,安全始终是首要考虑的因素,操作员必须严格按照规程执行,避免任何可能的风险。
KUKA机器人的手动示教对模操作规程详细规定了每一步的操作流程,旨在提高效率,保证安全,确保机器人能够在预定的路径上准确、稳定地工作。理解和熟练掌握这些步骤对于有效利用KUKA机器人至关重要。
Version 1.0
如下图所示,若选择基坐标,则按下示教器背后的使能按键后,屏幕上会高亮显示X、Y、
Z、A、B、C,
剩余31页未读,继续阅读
414 浏览量
122 浏览量
点击了解资源详情
903 浏览量
238 浏览量
414 浏览量
180 浏览量
2023-10-19 上传

AAA_自动化工程师
- 粉丝: 7159
- 资源: 3496
 我的内容管理
展开
我的内容管理
展开







最新资源
- yolov3 yolov3-tiny yolov4 yolov-tiny预训练模型下载
- TCSC.zip_tcsc simulink_无功补偿_电力 补偿_电容器_电容器补偿
- fs-family:已弃用:显示一对夫妇,并可以选择加载和显示该夫妇的孩子
- github-upload
- Open-Myo:使用通用BLE接口从Myo臂章获取数据的Python模块
- D3-React-Patterns:各种技术和模式的集合,用于在较大的React框架内组织D3项目。 这将是任何人都可以参与的公开回购,更多细节可以在DVS松弛中找到。
- Yolov5-master.zip
- RoboSpice-samples:RoboSpice库的所有样本
- ExtremeSpaceCombat:带有太空飞船的Java游戏
- 学生管理系统源码.zip
- FurniTale::no_entry:种族关系进展
- 捷德
- Trapped
- 高斯白噪声matlab代码-PE-GAMP:带有内置参数估计的通用近似图像消息传递
- 安卓Android活动社交仿QQ聊天app设计
- sdnotify-proxy:在不同cgroup中的systemd和进程之间代理sd_notify消息
