"FXN系列可编程控制器步进指令及状态编程法2022优秀文档及图表方法"
161 浏览量
更新于2024-01-19
收藏 1.79MB PPT 举报
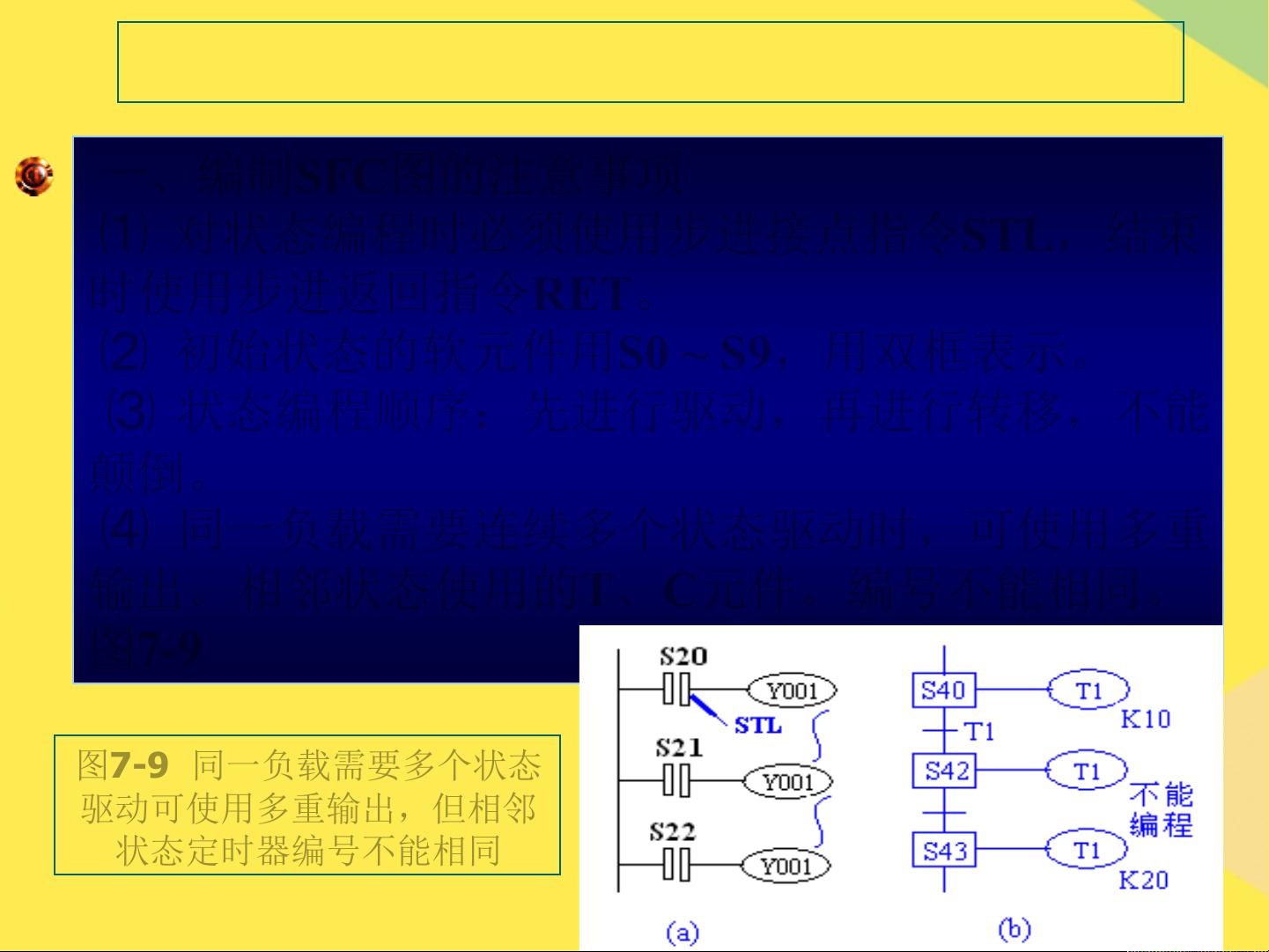
本文主要介绍了状状态态法法及其在可编程控制器步进指令和状态编程中的应用。状状态态法法是程序编制的重要方法和工具之一,它可以用来描述工步状态的工艺流程图,描绘控制过程、功能和特性的图形。状状态态法法通常由初始状态、一系列一般状态、转移线和转移条件组成。每一个状态提供三个功能:驱动相关负载、指定转移条件和指定转移目标。
在可编程控制器中,状状态态法法可以用来编写步进指令和状态梯形图(STL)。步进指令是一种用于控制执行顺序的指令,在程序执行过程中按照定义的顺序逐步执行。状态梯形图是一种以状态为基础的图形编程语言,可以用来描述系统的状态和状态之间的转移关系。
在使用状状态态法法进行编程时,首先需要绘制状态转移图,然后根据状态转移图将其转换成状态梯形图或指令表。状态转移图是状态编程的重要工具,可以清晰地显示系统状态及其之间的转移关系。通过将状态转移图转换成状态梯形图或指令表,可以方便地编写控制逻辑,并实现步进指令的执行。
在状状态态编程中,还介绍了STL和触点之间的关系。STL是一种用于描述步进指令和状态转移的图形编程语言,它由不同的触点、线圈和逻辑运算符组成。触点是系统中的输入信号,可以是传感器的信号、按钮的信号等。通过在STL中使用触点,可以控制步进指令的执行和状态转移的发生。
需要注意的是,在使用STL进行编程时,不可以使用MC/MCR指令来操作触点。MC/MCR指令是一种特殊的指令,只能在程序的起始位置使用。因此,需要使用其他方式来实现触点的操作。可以通过在STL中添加逻辑运算符、线圈和其他触点来实现触点的逻辑关系和操作。
综上所述,状状态态法法和STL是可编程控制器步进指令和状态编程的重要方法和工具。通过使用状状态态法法和STL编写步进指令和状态梯形图,可以实现对系统状态和状态之间转移关系的清晰描述和控制逻辑的编写。在编写STL时,需要注意不使用MC/MCR指令来操作触点,而是通过其他方式来实现触点的操作。
第
第
一
一
节
节
步
步
进
进
指
指
令
令
与
与
状
状
态
态
转
转
移
移
图
图
表
表
示
示
方
方
法
法
第
第
一
一
节
节
步
步
进
进
指
指
令
令
与
与
状
状
态
态
转
转
移
移
图
图
表
表
示
示
方
方
法
法
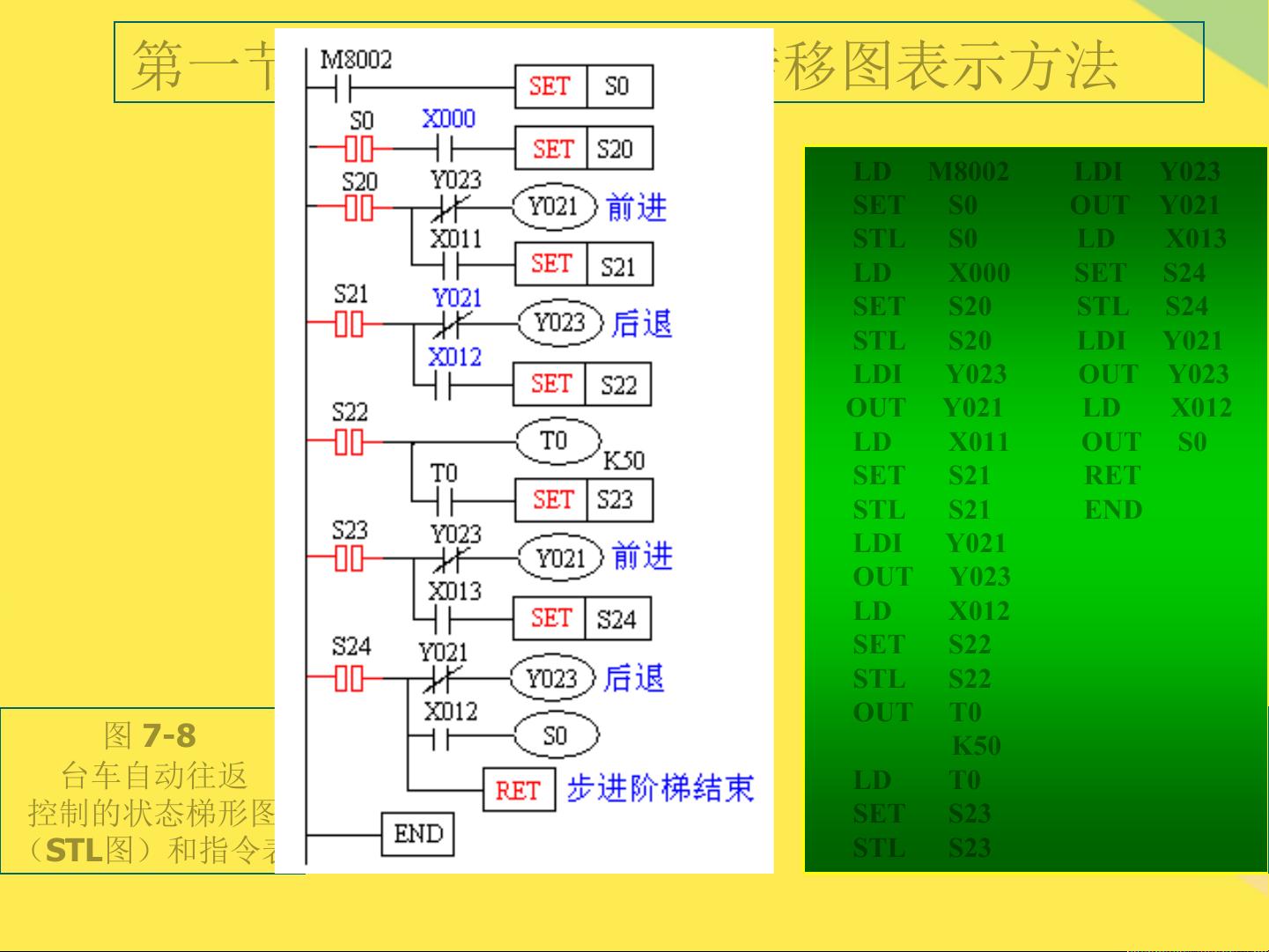
SFC图 — 是以机械控制的流程表示状态的流程,
STL图全部是由继电器来表示控制流程的程序。
SFC图可以转换成STL图,写出语句表。
三、状态转移图(SFC)转换成状态梯形图(STL)、指令表程序
11/16/2022
剩余60页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-10-07 上传
2021-10-09 上传
2022-11-19 上传
2022-12-03 上传
2021-10-02 上传









