
- 4 -
1.2 运动控制器概况
运动控制就是对机械运动部件的位置、速度、位移等进行实时的控制管理,使其
按照预期的运动轨迹和规定的运动参数进行运动
[9]
。早期的运动控制技术并不是十分
的成熟,随着数控技术、机器人技术和工厂自动化技术的发展和对运动控制的要求,
运动控制逐渐进入人们的视野。
广义上来说,运动控制可以帮助我们更加灵活方便的使用电动机而不需要太多的
能耗,最大程度满足我们的应用需求。运动控制有它一些特有的高级功能,人们可以
通过模块搭建来高效的实现运动控制的应用,已解决一些加工过程中必须解决的问题,
例如,如何实现精确定位问题、如何实现多轴同步的问题,以及如何实现制定运动控
制过程中的速度、加速度和减速度的问题等。因为大多数电动机的是工作在瞬时的环
境中的,它的每一步都在不断变化着的,所以就要求具有运动控制功能的设备必须适
应不同的负载情况和动态变化的条件,不仅如此,还应具有一些复杂的控制算法和反
馈信息的功能。由于要实现精确地运动控制,所以对运动控制的要求一般比较严格,
操作过程中的安全性能是最重要的,所以,运动控制中还具备一些安全保护特性,如
限位开关,可以有效的防止事故的发生。
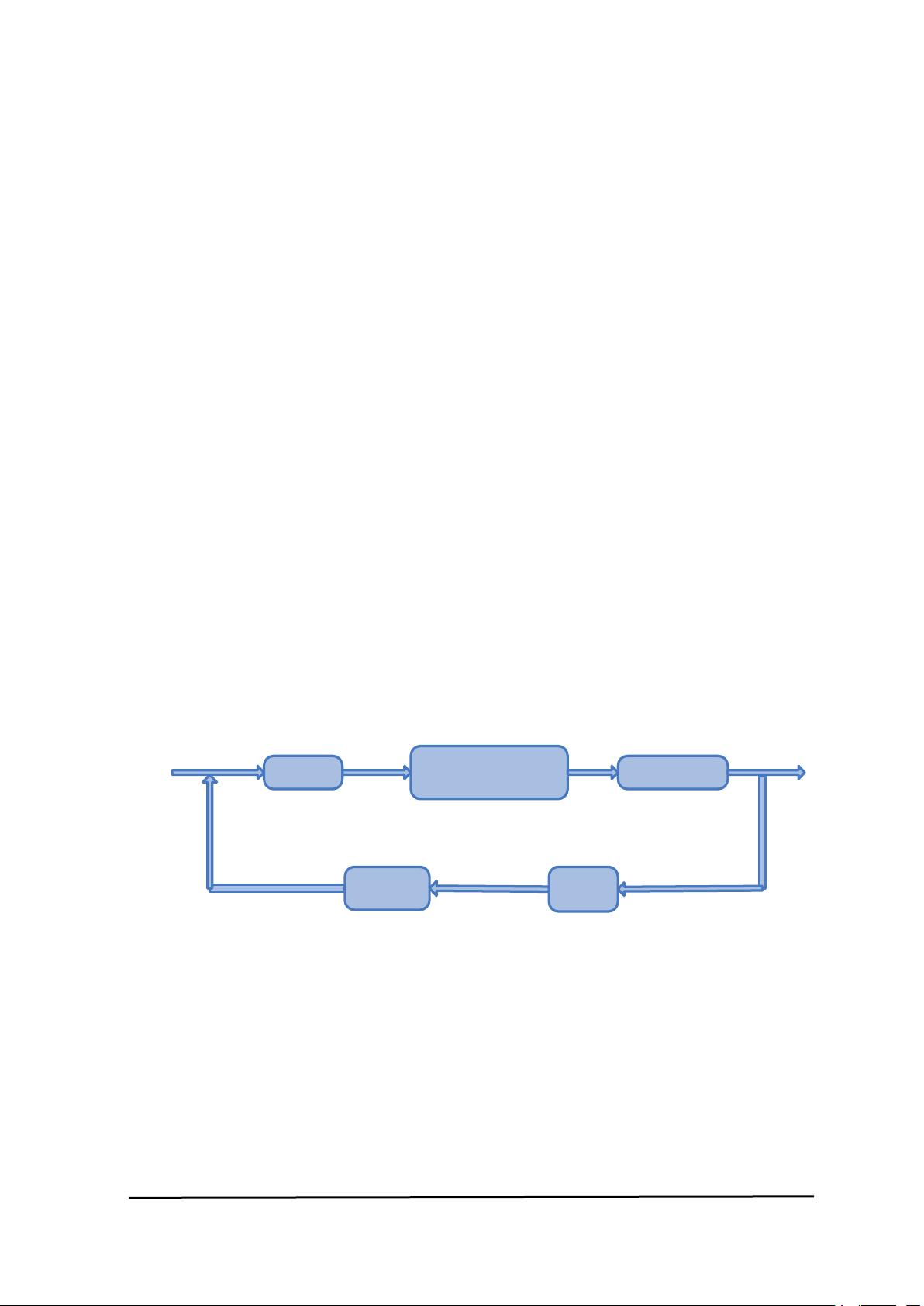
从结构上看,一个典型的运动控制系统的硬件主要是由上位计算机、运动控制器、
功率驱动电动机、传感器反馈检测装置和被控对象等几部分组成(如图 1.2 所示),
其中为被控对象提供动力的主要是电机和功率驱动设备,同时还将负载运行情况反馈
给控制系统。
控制器 功率放大与变换装置 电动机及负载
信号处理
传感器
图 1.2 运动控制系统及其组成
1.2.1 运动控制器的分类
自上世纪八十年代初期以来,通用运动控制器就已经应用在了国外的很多行业,
并且获得了不错的效果,特别是在微电子行业的应用更是广泛,由于当时国内技术还
比较落后,经济还不发达,没有许多人力财力去研究这一领域,所以运动控制器在国
内的应用规模和行业领域都很小,国内也没能开发出运动控制类的产品。1999 年,
固高科技有限公司开始大力从事开发、生产开放式通用运动控制器产品,并且价格便
剩余19页未读,继续阅读

omyligaga
- 粉丝: 60
- 资源: 2万+

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助







