R-CNN、Fast R-CNN与YOLO系列:目标检测深度解析
版权申诉
PPTX格式 | 3.43MB |
更新于2024-06-27
| 23 浏览量 | 举报
本资源是一份关于人工智能中的目标检测技术详细介绍,涵盖了RCNN系列算法、SSD算法以及YOLO系列算法的深入讲解。第8章“目标检测”主要探讨了这三个流行的算法在解决计算机视觉问题中的关键步骤。
首先,RCNN(Region-based Convolutional Neural Networks)系列算法,如R-CNN、Fast R-CNN和Faster R-CNN,是一个逐步改进的过程。R-CNN通过选择性搜索算法提出2000个左右的候选区域,然后通过CNN(如AlexNet)进行特征提取,使用SVM进行分类和边框调整,通过非极大值抑制(NMS)去除重叠。然而,这些方法存在训练和测试时间长、占用磁盘空间大的缺点。
Fast R-CNN和Faster R-CNN引入了显著改进。Fast R-CNN不再逐个处理候选区域,而是对整张图片进行特征提取,然后使用RoI池化层生成固定长度的特征向量,同时进行多任务学习,包括分类和边框回归。Faster R-CNN进一步优化了这个过程,通过RPN(Region Proposal Network)生成候选框,并结合粗分类和定位,提高了检测速度和准确性。
YOLO(You Only Look Once)系列算法则采用了一种单阶段检测方法,如YOLOv1和YOLOv2。YOLOv1通过线性函数作为激活函数,直接输出目标的位置和类别,简化了流程但保持了较高的精度。YOLOv2则引入了更智能的锚点生成和迁移学习策略,提升了对高分辨率图像的处理能力。YOLOv3在此基础上,进一步优化了主干网络和先验框设计,引入了多尺度特征检测。
SSD(Single Shot MultiBox Detector)算法采用了VGG网络作为基础,利用特征金字塔结构生成不同大小的候选框,减少了计算量。它通过生成一系列同心的先验框,结合不同大小和长宽比,实现目标检测。
总结来说,本章节详细解析了目标检测技术的核心概念,包括区域选择、特征提取、分类器应用,以及如何通过不同算法设计来提高效率和精确度。理解这些算法的关键在于掌握候选区域生成、特征提取方法、多任务学习以及多尺度和并行检测的策略。
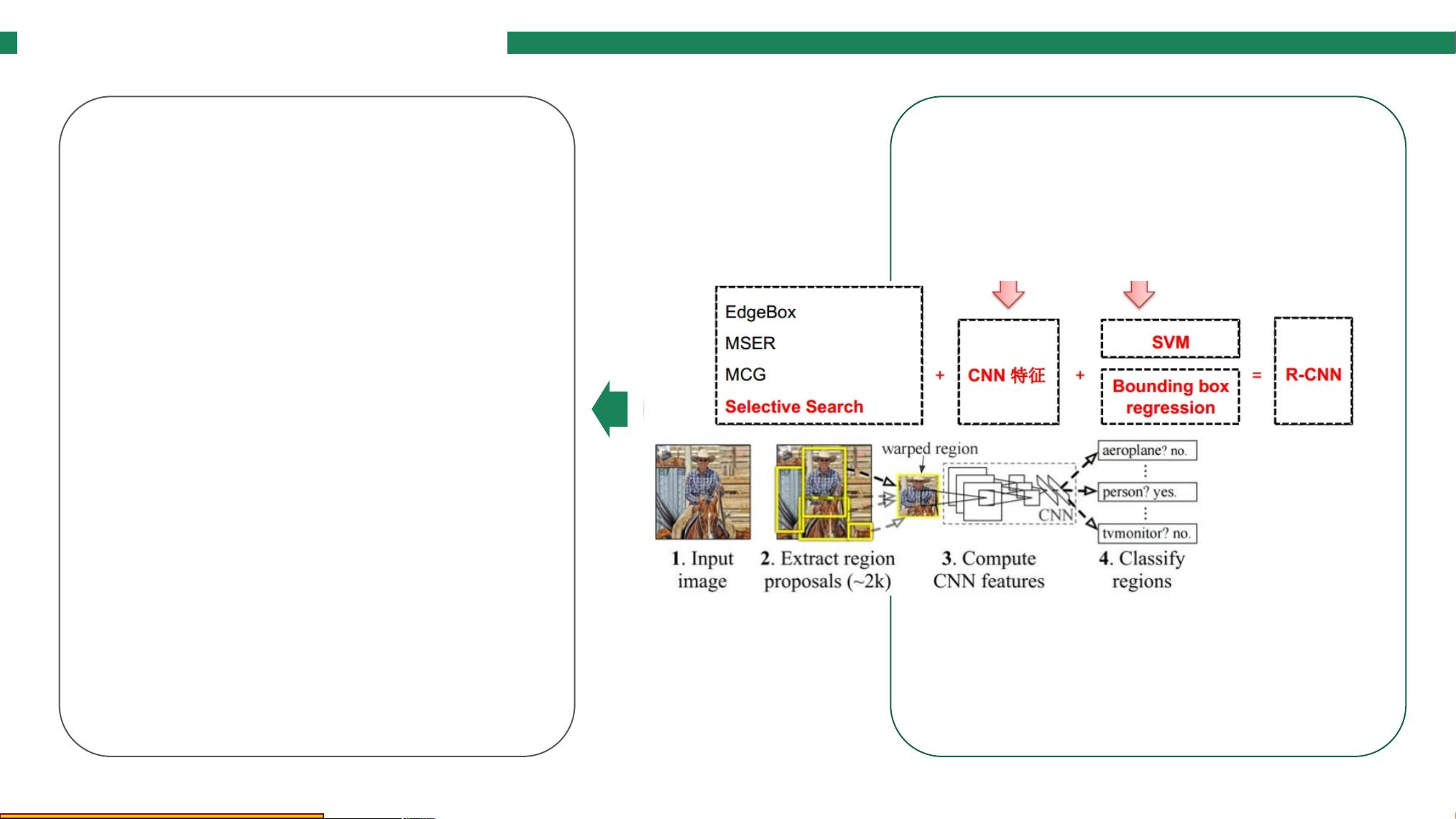
R-CNN
利用选择性搜索算法在图像
中提取2000个左右的候选框
;
把所有候选框缩放成固定大
小(227*227),并进行归一
化后输入CNN(AlexNet)网
络,提取特征;
提取到的CNN特征使用SVM
来分类,用线性回归来微调边
框位置与大小,其中每个类别
单独训练一个边框回归器;
非极大值值抑制(NMS)来滤除
重叠的候选框
存在问题
训练时间长
测试时间长
占用磁盘空间大
卷积出来的特征数据还需要单独
保存
rcnn算法
剩余17页未读,继续阅读
相关推荐




是空空呀
- 粉丝: 198
 我的内容管理
展开
我的内容管理
展开







最新资源
- 微信小程序开发教程源码解析
- Step7 v5.4仿真软件:s7-300最新版本特性和下载
- OC与HTML页面间交互实现案例解析
- 泛微OA官方WSDL开发文档及调用实例解析
- 实现C#控制佳能相机USB拍照及存储解决方案
- codecourse.com视频下载器使用说明
- Axis2-1.6.2框架使用指南及下载资源
- CISCO路由器数据可视化监控:SNMP消息的应用与解析
- 白河子成绩查询系统2.0升级版发布
- Flutter克隆Linktree:打造Web应用实例教程
- STM32F103基础之MS5单片机系统应用详解
- 跨平台分布式Minecraft服务端:dotnet-MineCase开发解析
- FileZilla FTP服务器搭建与使用指南
- VB洗浴中心管理系统SQL版功能介绍与源码分析
- Java环境下的meu-grupo-social-api虚拟机配置
- 绿色免安装虚拟IE6浏览器兼容Win7/Win8
