表
2
SDAN-MD
的结构(
PReLU
表示参数校正线性单元)。
阶段层过滤器(过滤器数量、大小、步幅)填充输入输出
第一级输入层
240× 240× 3 240×240 × 3
转换层96,3
×
3 × 3,1 1
×
1 120
×
120
×
3 120
×
120 × 96
CAB
(
PReLU + Sigmoid
)
96
,
3× 3× 96
,
1
24、1
×
1
×
96、1
96,1
×
1
×
24,1
1
×
1 120
×
120
×
96 120
×
120 × 96
第一
次
下采样
144,1
×
1 × 96,1 1
×
1 120
×
120
×
96 60
×
60 × 144
第
二
次
下采样
192,1
×
1 × 144,1 1
×
1 60
×
60
×
144 30
×
30 × 192
第一
次
上采样
144,1
×
1 × 192,1 1
×
1 60
×
30
×
192 120
×
60 × 144
第
二
次
上采样
96
,
1
×
1 × 144
,
1 1
×
1 120
×
60
×
144 240
×
120 × 96
SDAM 96
,
3
×
3
×
96
,
1
3
、
1
×
1
×
96
、
1
1
×
1 240
×
120 × 96
240
×
120 × 3
第二阶段输入层
240× 240× 3 240×240 × 3
第
一转换层
96,3
×
3 × 3,1 1
×
1 240
×
120
×
3 240
×
120 × 96
CAB
(
PReLU + Sigmoid
)
96
,
3× 3× 96
,
1
24
、
1
×
1
×
96
、
1
96
,
1
×
1
×
24
,
1
1
×
1 240
×
120
×
96 240
×
120 × 96
级联
第二
Conv
层
96,3
×
3 × 192,1 1
×
1 240
×
120
×
192 240
×
120 × 96
第一
次
下采样
144,1
×
1 × 96,1 1
×
1 240
×
120
×
96 120
×
60 × 144
第
二
次
下采样
192,1
×
1 × 144,1 1
×
1 120
×
60
×
144 60
×
30 × 192
第一
次
上采样
144,1
×
1 × 192,1 1
×
1 60
×
60
×
192 120
×
120 × 144
第
二
次
上采样
96,1
×
1 × 144,1 1
×
1 120
×
120
×
144 240
×
240 × 96
SDAM 96
,
3
×
3
×
96
,
1
3、1
×
1
×
96、1
1
×
1 240
×
240
×
96 240
×
240 × 96
240
×
240 × 3
第
3
级输入层
240× 240× 3 240×240 × 3
第
一转换层
96,3
×
3 × 3,1 1
×
1 240
×
240
×
3 240
×
240 × 96
CAB
(
PReLU + Sigmoid
)
96
,
3× 3× 96
,
1
24、1
×
1
×
96、1
96,1
×
1
×
24,1
1
×
1 240
×
240
×
96 240
×
240 × 96
级联
第二
Conv层
128
,
3
×
3 × 192
,
1 1
×
1 240
×
240
×
192 240
×
240 × 128
ORB(3)128,3
×
3
×
128,1
32、1
×
1
×
128、1
128,1
×
1
×
32,1
1
×
1 240
×
240
×
128 240
×
240 × 128
第
三转换层
3
,
3
×
3 × 128
,
1 1
×
1 240
×
240
×
128 240
×
240 × 3
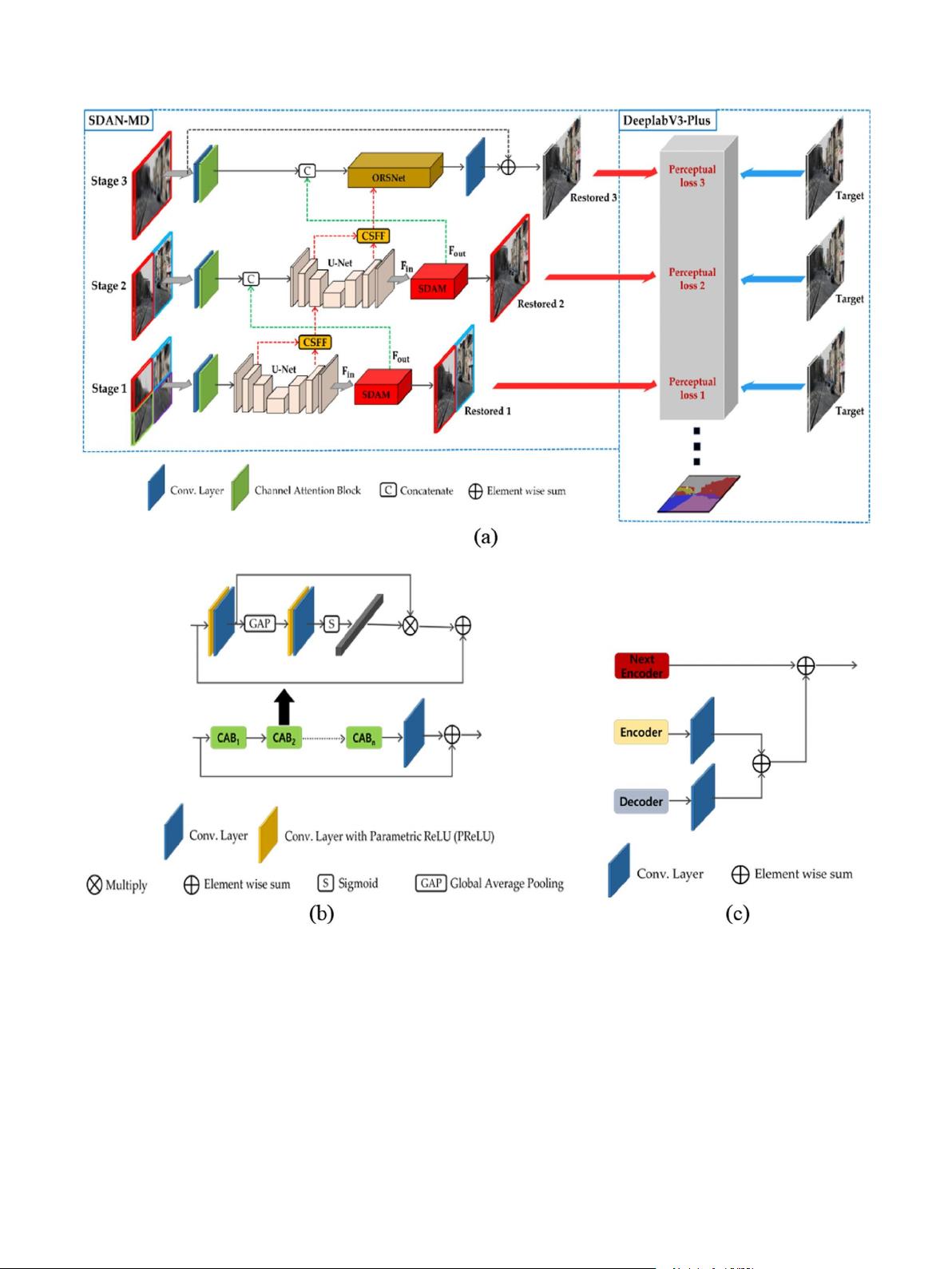
可以减少由转置卷积引起的伪像(Odena等人,2016年)。每个原始分
辨率块(ORB)由通道注意块(CAB)组成。SDAN-MD的更详细的解
释包括在以下小节中。
3.2.1.
SDAN-MD
的详细描述
本研究中使用的基于多阶段的恢复网络作为基线,从早期阶段到
最后阶段交换信息,并在基于监督学习方法的图像恢复领域中展示了
出色的性能,在每一步中使用地面真值我们添加了感知损失,利用分
割网络产生出色的性能,即使当恢复网络的输出图像成为分割网络的
输入。图
2
示出了所提出的模型的总体架构。它包括总共三个阶段,
其中图像分别在第一阶段和第二阶段中被应用
4
路分割和
2
路分割。
通过
CAB
提取具有通道注意信息的特征,然后成为子网络的输入。
上下文信息在阶段
1
和阶段
2
中通过子网络学习。我们使用标准的
U-
Net
作为具有编码器
-
解码器架构的子网络最后,在第三步中
ORSNet
由三个原始分辨率块
(ORB)组成,其中每个ORB由CAB组成。 空间
上
足够的特征可以通过
ORSNet
获得,因为分辨率在不应用下采样的
情况下得以保持。我们将每一阶段编码器和解码器提取的特征传递给
下一阶段的编码器和
ORSNet
,以减少由于上采样和下采样而导致的
特征损失,并参考
-
在
MPRNet
中建立了跨阶段特征融合(
CSFF
)模块(
Zamir
等人,
2021
年)。
编码器-解码器子网络的输出成为所提出的SDAM在级1和级2中的输
入。每个阶段中的SDAM的输出特征图在成为下一阶段中的子网络的输
入之前被传送并应用信道级级联,然后在经过卷积层之后成为每个阶段
中的子网络的输入。在这样的逐步恢复过程中,三个恢复的图像,这是
每个阶段的输出,成为分割网络的输入,并使用预先训练的分割网络计
算从目标的感知损失。我们使用以下方法对恢复过程中使用的每个数据
集 的目 标 图 像 进行了 预 训 练 : DeeplabV 3-Plus细分网 络 。 选择
DeeplabV 3-Plus是因为它在CamVid数据集中表现出出色的语义分割
性能(Zhu等人, 2019年)。
3.2.2.
SDAM
的详细描述
我们建议SDAM在每个阶段提供地面实况的监督信号,并使重要信
息 通过双重注意机制在不同阶段之间进行交换。SDAM的结构如图所
示。3.第三章。
在图
2
(
a
)的
SDAN-MD
中,信道注意过程被包括在
SDAN-MD
的开始中,以在每个阶段进入子网络(
UNet
)之前细化特征图然
后,在进入子网络之前,将该相比之下,由于注意力地图是在本地监
督预测的帮助下在
SDAM
中生成的,因此我们在生成恢复图像后在
SDAM
的末尾包含了通道注意力模块 如图
3
、
SDAM
生成残差图像


 我的内容管理
展开
我的内容管理
展开









