舵机控制原理与PWM信号详解
需积分: 3 77 浏览量
更新于2024-07-31
收藏 5.9MB DOC 举报
"这篇资料详细介绍了舵机控制原理,包括PWM信号的定义、舵机的控制方式、单舵机调速算法以及8舵机联动的PWM指令算法。内容涵盖从基本的PWM信号介绍到复杂的多舵机同步控制,适合对舵机控制感兴趣的读者学习和参考。"
舵机控制原理主要涉及以下几个方面:
一、PWM信号介绍
1. PWM信号的定义:PWM(Pulse Width Modulation)即脉宽调制信号,通过改变脉冲宽度来调整输出信号的平均功率。在舵机控制中,PWM信号的上升沿和下降沿之间的时间宽度决定了舵机的角度位置。
2. PWM信号控制精度:通常,舵机的精度由时基寄存器中的数值决定,如文中提到的1DIV等于8微秒,250DIV等于2毫秒。这意味着舵机能实现精细的位置控制,每个DIV对应约0.74度的旋转角度。
二、单舵机拖动及调速算法
1. HG14-M舵机的位置控制:这种数字舵机采用传统的PWM协议,允许快速位置锁定和跟踪,且对PWM信号要求较低,上升沿至少0.5毫秒,下降沿可为0.5毫秒的标准方波。
2. 舵机调速算法:通过调整PWM脉宽,可以在0.5毫秒至2.5毫秒之间改变脉宽,从而控制舵机的转动速度。舵机转动的极限下降沿PWM脉宽会影响其最高速度。
三、8舵机联动单周期PWM指令算法
1. 控制要求:为了实现多个舵机的同步运动,需要精确控制每个舵机的PWM信号,确保它们在同一时刻到达目标位置。
2. 注意事项:在设计联动算法时,需要考虑扫尾问题,即如何确保所有舵机在完成动作后回到起始位置的一致性。
3. PWM信号发生算法:这涉及到N排序子程序RAM的制定和N差子程序解析,以生成正确的PWM序列。
4. 扫尾问题:扫尾是指舵机在完成一系列动作后,回到起始位置的过程。扫尾值的计算对于保证联动动作的精确同步至关重要。
这份资料详细地阐述了舵机控制的基础知识,从基本的PWM信号定义到复杂的多舵机联动控制,对理解舵机工作原理和设计控制策略有着极大的帮助。无论是模型制作还是机器人工程,了解这些内容都能提升项目的精确性和效率。
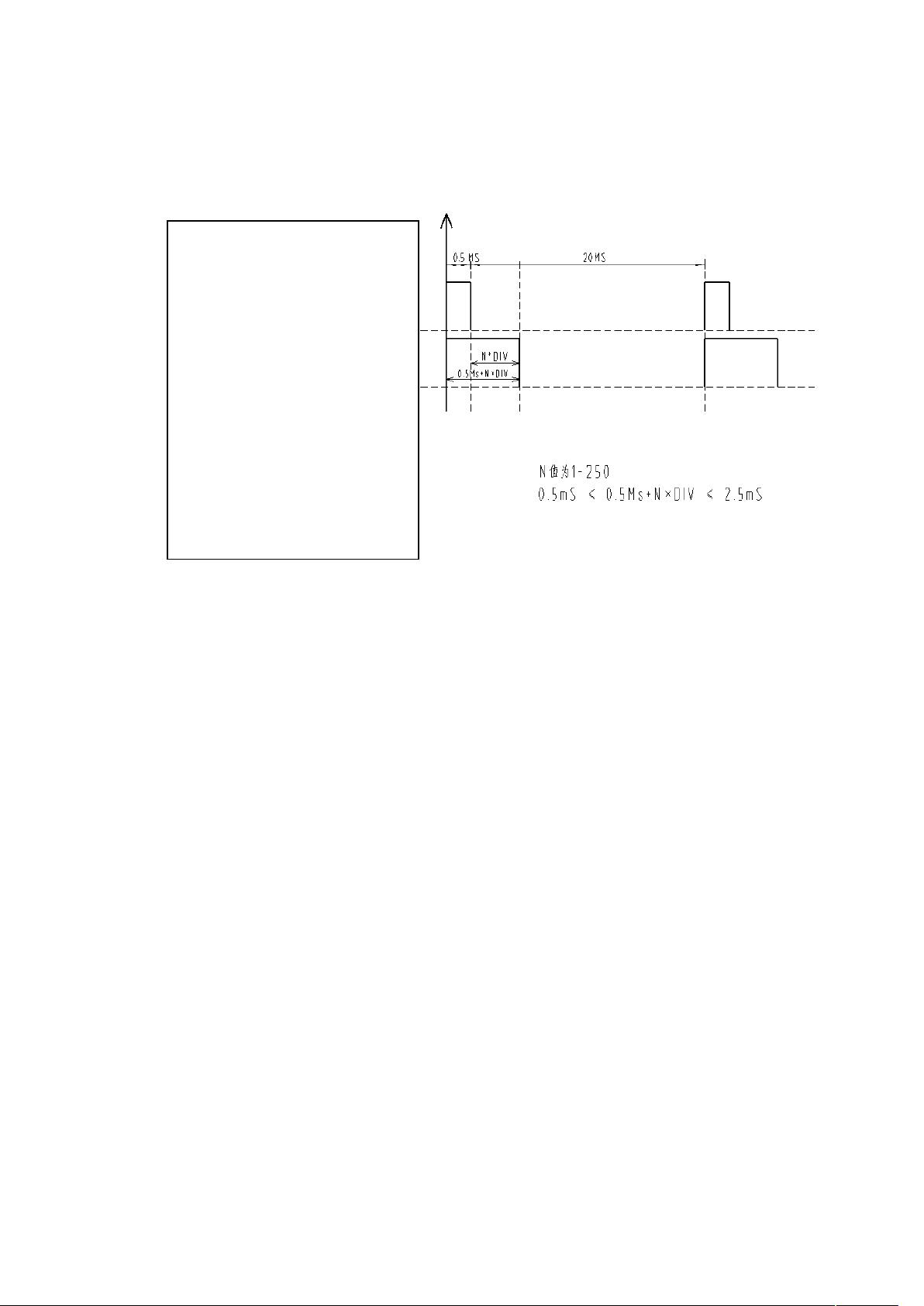
2.PWM 信号控制精度制定
1 DIV = 8uS ; 250DIV=2mS
时基寄存器内的数值为:(#01H)01 ----(#0FAH)250。
共 185 度,分为 250 个位置,每个位置叫 1DIV。
则:185÷250 = 0.74 度 / DIV
PWM 上升沿函数: 0.5mS + N×DIV
0uS ≤ N×DIV ≤ 2mS
0.5mS ≤ 0.5Ms+N×DIV ≤ 2.5mS
3 / 17
3
图
1-
2
我 们 采 用 的 是 8 位
AT89C52CPU,其数据分辨率为
256,那么经过舵机极限参数实
验,得到应该将其划分为 250 份。
那么 0.5mS---2.5Ms 的宽
度为 2mS = 2000uS。
2000uS÷250=8uS
则:PWM 的控制精度为 8us
我们可以以 8uS 为单位递
增控制舵机转动与定位。
舵机可以转动 185 度,那
么 185 度÷250=0.74 度,
则:舵机的控制精度为 0.74 度
剩余16页未读,继续阅读
1244 浏览量
619 浏览量
323 浏览量
271 浏览量
236 浏览量
165 浏览量
759 浏览量
124 浏览量
179 浏览量

friendyh
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







