
基于视觉导航的导览机器人控制系统研究基于视觉导航的导览机器人控制系统研究
1 引言 在研究机器视觉的移动机器人导航技术的基础上,基于层次结构,简单介绍导览机器人控制系统的
总体方案及软硬件设计。采用图像处理中的边缘检测和模板匹配方式进行机器人的视觉导航,使机器人在结构
化道路环境下能够自动躲避障碍物,停靠到目标点,并能向参访者导览解说,验证了该系统的有效性和优越
性。 2 导览机器人简介 导览机器人用在大型展览馆、博物馆或其他会展中心,引导参访者沿着固定路
线参访,向参访者解说以及进行简单对话。因此导览机器人必须具有自主导航、路径规划、智能避障、目标点
的停靠与定位、语音解说以及能与参访者进行简单对话等功能,并具有对外界环境快速反应和自适应能力。基
于层次结构,导览
1 引言引言
在研究机器视觉的移动机器人导航技术的基础上,基于层次结构,简单介绍导览机器人控制系统的总体方案及软硬件设
计。采用图像处理中的边缘检测和模板匹配方式进行机器人的视觉导航,使机器人在结构化道路环境下能够自动躲避障碍物,
停靠到目标点,并能向参访者导览解说,验证了该系统的有效性和优越性。
2 导览机器人简介导览机器人简介
导览机器人用在大型展览馆、博物馆或其他会展中心,引导参访者沿着固定路线参访,向参访者解说以及进行简单对话。
因此导览机器人必须具有自主导航、路径规划、智能避障、目标点的停靠与定位、语音解说以及能与参访者进行简单对话等功
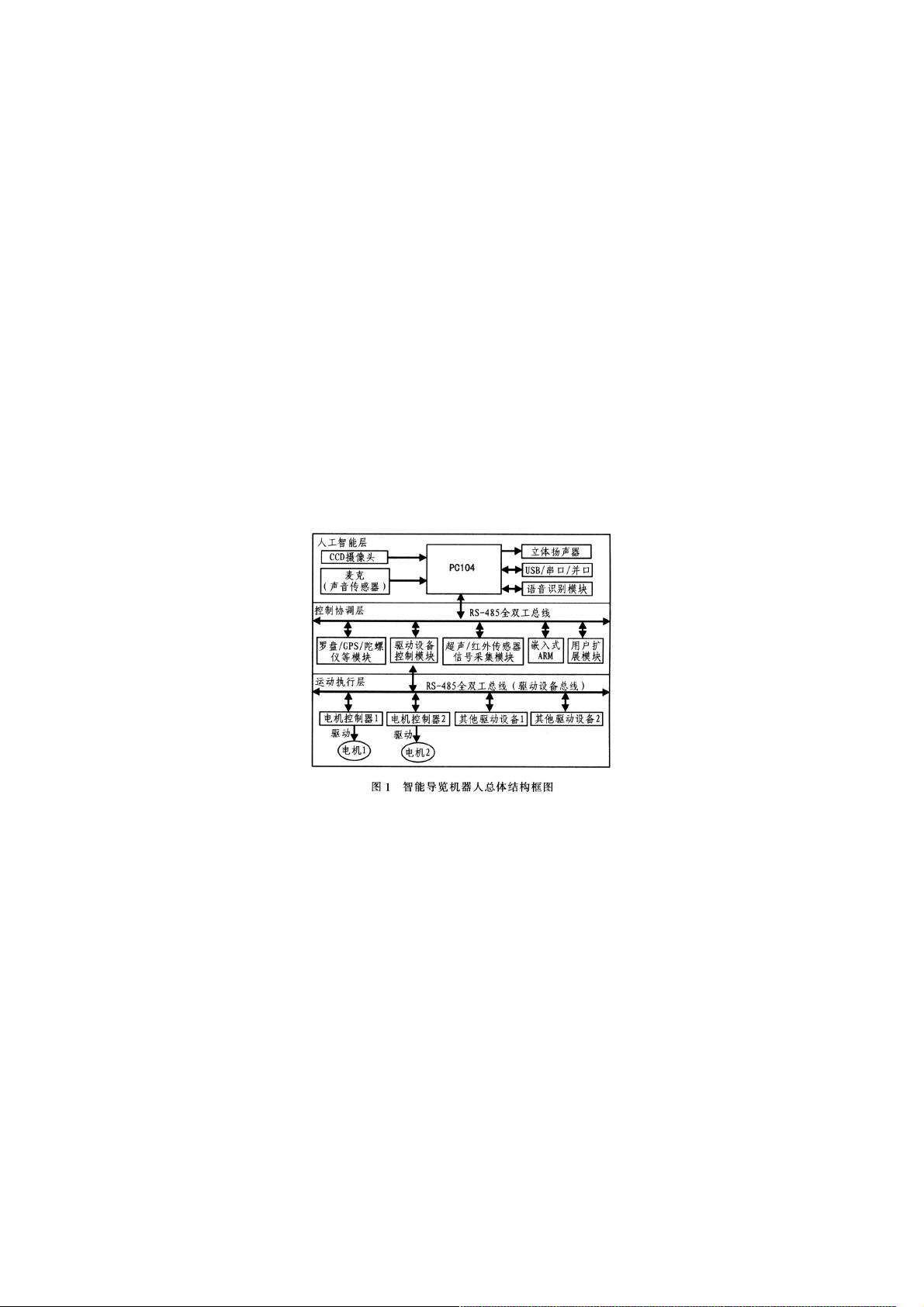
能,并具有对外界环境快速反应和自适应能力。基于层次结构,导览机器人可分为:人工智能层、控制协调层和运动执行层。
其中人工智能层主要利用CCD摄像头规划和自主导航机器人的路径,控制层协调完成多传感信息的融合,而运动执行层完成
机器人行走。图1为智能导览机器人的总体结构框图。
3 导览机器人硬件设计导览机器人硬件设计
3.1 人工智能层硬件实现人工智能层硬件实现
考虑到移动机器人控制系统要求处理速度快、方便外围设备扩展、体积和质量小等要求,因此上位机选用PC104系统,
其软件用C语言编程。采用USB摄像头,采集机器人前方的视觉信息,为机器人视觉导航,路径规划提供依据。外设麦克和扬
声器,当机器人到达目标点后,进行导览解说。
3.1.1 控制协调层的硬件实现控制协调层的硬件实现
机器人传感器的选取应取决于机器人的工作需要和应用特点。这里选用超声波传感器、红外传感器、电子罗盘及陀螺仪,
采集机器人周围环境信息,为机器人避障、路径规划提供帮助。利用ARM处理平台,通过RS-485总线驱动电机,驱动机器
人行走。
导览机器人要求传感器精度稍高,重复性好,抗干扰能力强,稳定性和可靠性高。机器人在行进过程中必须能够准确获得
其位置信息,数字罗盘可靠输出航向角,陀螺仪测量偏移并进行必要修正,以保证机器人行走的方向不偏离。采用超声波传感
器和红外传感器相结合的方法获取前方障碍物信息。该系统设计选用6个超声波传感器和6个红外传感器。其中,正前方和正
后方各1个,其余4个超声波传感器分别位于正前方和正后方的两边,夹角为45°,红外传感器分别安装在超声波传感器的正上
方1~2 cm处。超声波传感器主要通过测距实现避障,而红外传感器主要是用于补偿超声波传感器的盲区,判断近距离是否有
障碍物。
3.1.2 运动执行层的硬件实现运动执行层的硬件实现
该智能导览机器人的执行机构采用直流伺服电机。这里选用三洋电机Super_L (24 V/3.7 A)额定输出功率为60 W,
下载后可阅读完整内容,剩余3页未读,立即下载

weixin_38694566
- 粉丝: 5
- 资源: 878
 我的内容管理
展开
我的内容管理
展开







最新资源
- OptiX传输试题与SDH基础知识
- C++Builder函数详解与应用
- Linux shell (bash) 文件与字符串比较运算符详解
- Adam Gawne-Cain解读英文版WKT格式与常见投影标准
- dos命令详解:基础操作与网络测试必备
- Windows 蓝屏代码解析与处理指南
- PSoC CY8C24533在电动自行车控制器设计中的应用
- PHP整合FCKeditor网页编辑器教程
- Java Swing计算器源码示例:初学者入门教程
- Eclipse平台上的可视化开发:使用VEP与SWT
- 软件工程CASE工具实践指南
- AIX LVM详解:网络存储架构与管理
- 递归算法解析:文件系统、XML与树图
- 使用Struts2与MySQL构建Web登录验证教程
- PHP5 CLI模式:用PHP编写Shell脚本教程
- MyBatis与Spring完美整合:1.0.0-RC3详解
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


