开源自驾仪APM入门详解:从零开始构建无人机控制系统
"APM自驾仪是一款开源的自动驾驶控制器,适用于固定翼、直升机、多旋翼和地面车辆。它具有免费的开源程序,支持多种载机模式,如ArduPlane、ArduCopter和ArduRover。用户可以通过图形化地面站进行设置和升级,无需专业知识。硬件方面,APM采用ATMEGA2560作为核心MCU,配备MPU6000六轴传感器、MS-5611气压传感器、HMC5883磁力计,支持多种扩展和接口。此外,它还支持自动起飞、降落、航线飞行和自动返航等功能,以及与Xplane和FlightGear的仿真兼容。"
本文将详细探讨APM自驾仪的基础知识,包括其主要特点、性能优势以及硬件构成,帮助读者深入了解这款强大的无人机控制系统。
首先,APM自驾仪的核心特性在于其开源性质,允许用户自由访问和修改源代码,以适应各种应用场景。它支持固定翼、直升机、多旋翼(如三轴、四轴、六轴、八轴)以及地面车辆,覆盖了广泛的无人平台。配合图形化的地面控制站,用户可以通过简单的鼠标操作完成参数设置和固件升级,降低了使用门槛。同时,APM自驾仪基于MAVLink协议,实现了双向遥测和实时传输,确保了控制系统的高效通信。
在硬件层面,APM自驾仪搭载了ATMEL的8位微控制器ATMEGA2560,负责处理飞行控制的关键任务。六轴传感器MPU6000结合三轴陀螺仪和加速度计,提供精确的飞行姿态数据。高精度的MS-5611数字空气压力传感器用于高度测量,确保飞行安全。此外,16MB的AT45DB161D存储器用于保存飞行数据和设置。三轴磁力计HMC5883用于确定飞行方向,而8路PWM控制输入和11路模拟传感器输入则为多通道控制提供了基础。APM自驾仪还配备了11路PWM输出,其中8路用于电机控制,3路用于云台稳定。它支持不同类型的GPS模块,如MTK3329或ublox系列,以满足定位需求。其扩展性包括屏蔽板载PPM解码功能,以便外接解码板或接收机,以及通过I2C接口使用外部罗盘。
在功能上,APM自驾仪不仅具备自动起飞和降落的能力,还能执行预设的航点航线飞行,当飞行器偏离预定路线时,它能自动返回起始位置,增强了飞行安全性。此外,它还支持与Xplane和FlightGear的仿真系统兼容,为用户提供了模拟飞行训练的可能。
APM自驾仪作为一款全面的开源自动驾驶控制器,其易用性、灵活性和强大的硬件配置使其成为无人机爱好者和开发者的理想选择。无论是初学者还是专业人士,都能通过APM自驾仪探索和实现各种创新的飞行应用。
风迅电子 http://shop109208831.taobao.com
八、地面站调试软件 Mission Planner 安装
首先,Mission Planner的安装运行需要微软的Net Framework 4.0 组件,所以在安装Mission Planner之前
请先下载Net Flamework 4.0 并安装,官方下载地址为
http://www.microsoft.com/zh-cn/download/confirmation.aspx?id=17718
安装完Net Framework后开始下载Mission Planner安装程序包,最新版本的Mission Planner可以点击此处
下载:
http://firmware.diydrones.com/Tools/MissionPlanner/,下载页面中每个版本都提供了MSI版和ZIP版可
供选择。MSI为应用程序安装包版,安装过程中会同时安装APM的USB驱动,安装后插上APM的USB线即可使用。ZIP
版为绿色免安装版,解压缩即可使用,但是连接APM后需要你手动安装APM的USB驱动程序,驱动程序在解压后的
Driver文件夹中。具体使用哪个版本请自行决定,如果是第一次安装使用,建议你下载MSI版。
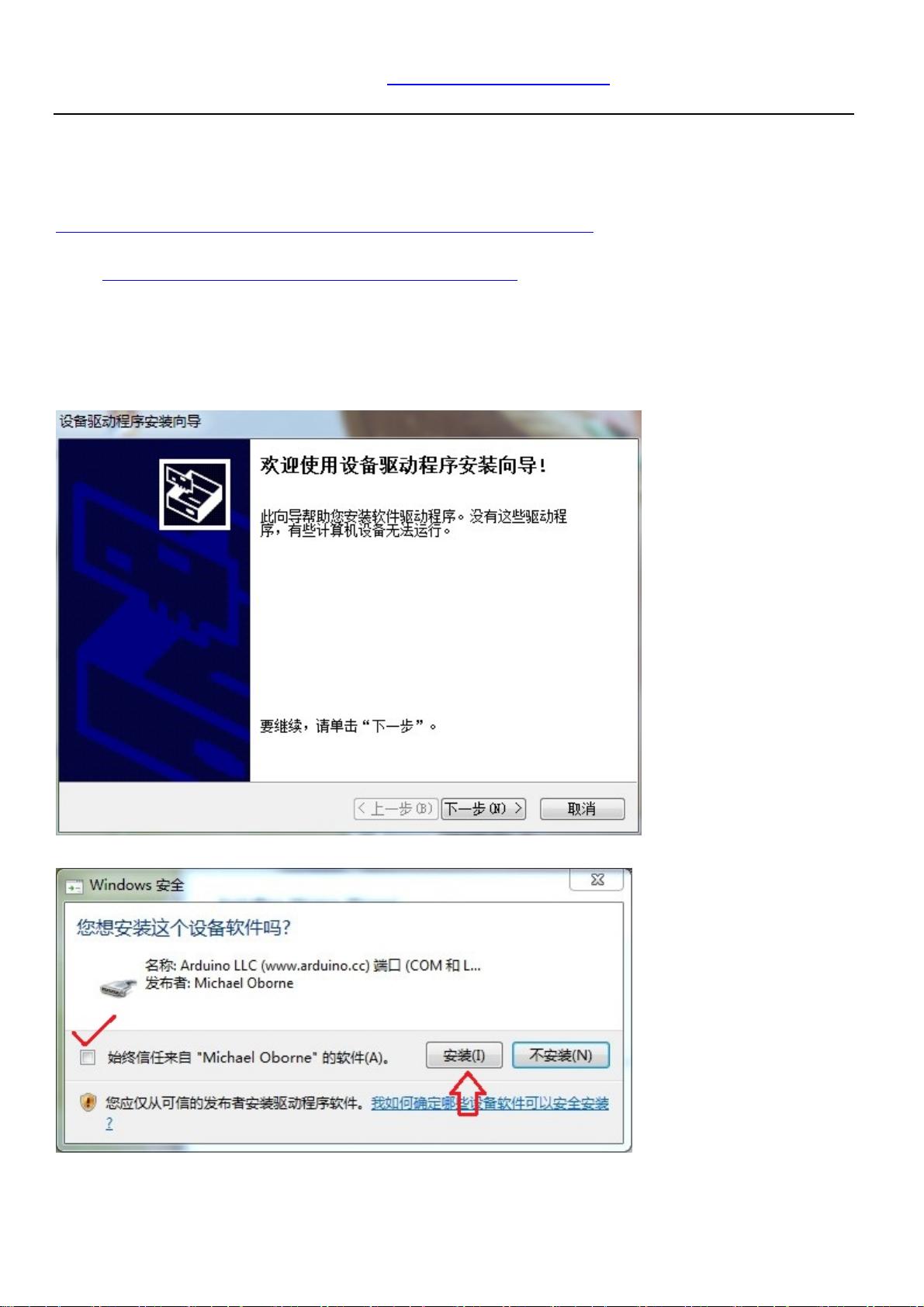
以安装 MSI 版为例(注意:安装前请不要连接 APM 的 USB 线),双击下载后的 MSI 文件,然后一步一步 Next
即可,只是安装过程中弹出设备驱动程序安装向导时,请点击下一步继续,否则会跳过驱动程序的安装
接着勾选始终信任……然后点击安装,安装程序会自动安装相关的驱动程序

剩余30页未读,继续阅读
2023-07-24 上传
2024-06-28 上传
2023-04-04 上传
2023-06-10 上传
2023-07-01 上传
2023-06-08 上传

zrf_lucky
- 粉丝: 1
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 天池大数据比赛:伪造人脸图像检测技术
- ADS1118数据手册中英文版合集
- Laravel 4/5包增强Eloquent模型本地化功能
- UCOSII 2.91版成功移植至STM8L平台
- 蓝色细线风格的PPT鱼骨图设计
- 基于Python的抖音舆情数据可视化分析系统
- C语言双人版游戏设计:别踩白块儿
- 创新色彩搭配的PPT鱼骨图设计展示
- SPICE公共代码库:综合资源管理
- 大气蓝灰配色PPT鱼骨图设计技巧
- 绿色风格四原因分析PPT鱼骨图设计
- 恺撒密码:古老而经典的替换加密技术解析
- C语言超市管理系统课程设计详细解析
- 深入分析:黑色因素的PPT鱼骨图应用
- 创新彩色圆点PPT鱼骨图制作与分析
- C语言课程设计:吃逗游戏源码分享
