非均匀采样数据系统:新型输入输出表示与应用
95 浏览量
更新于2024-08-26
收藏 326KB PDF 举报
"这篇研究论文探讨了通用非均匀采样数据系统的新颖输入输出表示方法。现有的非均匀采样数据(NUSD)系统通常采用提升状态空间模型和提升传递函数模型来描述,但这些模型过于复杂,参数众多,对系统的识别和控制带来了困难。为解决这一问题,作者提出了一个新的输入输出表示法,引入了一个时间变化的反向移位运算符。这种方法使得传统的单速率系统的识别方法和控制策略可以轻松地扩展到非均匀采样数据系统。通过一个仿真示例,论文展示了新模型的优势和有效性。"
在非均匀采样数据系统的研究中,不规则的输入和输出采样间隔使得这类系统成为一种普遍的多速率系统类型。由于硬件限制、经济考虑以及环境影响,NUSD系统在各种领域广泛应用。传统的NUSD系统建模方法,如提升状态空间模型和提升传递函数模型,虽然能够描述这类系统的动态行为,但在处理大量参数时变得复杂且难以处理,这极大地阻碍了系统识别和控制的效率。
针对这一挑战,论文提出了一种创新的输入输出表示方法,该方法引入了一个时间变量的反向移位操作器。这种新表示简化了模型结构,降低了参数数量,使得理解和分析非均匀采样数据系统变得更加直观和便捷。通过这种方法,已有的适用于单速率系统的识别技术,如最小二乘法、自回归移动平均模型(ARMA)等,可以被平滑地应用到NUSD系统中,而无需进行复杂的转换或调整。
此外,控制策略的设计也得到了简化。例如,常规的反馈控制算法,如比例积分微分(PID)控制器,现在可以直接应用于新模型,减少了设计复杂性和计算负担。论文中的仿真例子进一步验证了新模型在简化系统建模、提高识别和控制性能方面的优势,证明了该方法的有效性。
这项工作为非均匀采样数据系统的建模、识别和控制提供了一个新的视角和工具,有望推动该领域的理论发展和实际应用。通过减少模型的复杂性并增强模型的实用性,这种方法有望促进更高效、更精确的NUSD系统分析和控制。
Novel Input-output Representation of General Non-uniformly
Sampled-data Systems*
Li Xie, Huizhong Yang, Feng Ding and Hongfeng Tao
Abstract— The lifted state space model and the corresponding
lifted transfer function model have been widely adopted to de-
scribe non-uniformly sampled-data (NUSD) systems. However,
the lifted models are too complex and involve a large number
of parameters, which bring a great challenge to NUSD systems
identification and control. Motivated by this fact, we propose
a novel input-output representation of general NUSD systems
by introducing a time-varying backward shift operator. Based
on the novel model, the traditional identification methods and
control strategies of single-rate systems can be easily extended
to general NUSD systems. The advantages and effectiveness of
the novel model are well illustrated by a simulation example.
I. INTRODUCTION
Non-uniformly sampled-data (NUSD) systems with irreg-
ular sampling intervals for the inputs and/or outputs are
a class of general multirate systems [1]. Due to hard-
ware limitations, economic considerations and environmental
impacts, NUSD systems are widely existed in networked
control systems [2], [3], distributed control systems [4] and
process industries [5]. Compared with the uniform sampling,
non-uniform sampling can acquire more useful information
within a finite sampling time. It can help reduce the average
sampling frequency and improve the utilization efficiency
of the processor [6]. Therefore, non-uniform sampling have
been widely applied in radar target recognition, signal de-
tection and data communication fields. Furthermore, the
NUSD control systems can improve the properties of the
conventional single-rate control systems [7], [8]. Thus, the
manipulated variables or the controlled variables can be non-
uniformly updated or sampled in order to meet certain special
control requirements [9].
In recent years, NUSD systems have been widely dis-
cussed in the area of identification and control [10]. For
example, Ding et al. derived a hierarchical identification
algorithm for the lifted state space model, and studied the
reconstruction of the original continuous-time system [11].
Ding and Lin presented a modified subspace identification
algorithm for the lifted state space model, where the causality
constraint was tackled by decomposition of the lifted mea-
surement equation [12]. To avoid solving the causality con-
straint and reduce the computational load, a partially coupled
*This work was supported by the National Natural Science Foundation
of China (No. 61403166) and the Natural Science Foundation of Jiangsu
Province (China, BK20140164).
The authors are with Faculty of the Control Sci-
ence and Engineering Research Center, Jiangnan Univer-
sity, Wuxi, P. R. China xieli@jiangnan.edu.cn
(L. Xie); yhz@jiangnan.edu.cn (H.Z. Yang);
fding@jiangnan.edu.cn (F. Ding);
taohongfeng@hotmail.com (H.F. Tao)
stochastic gradient algorithm [13] and an auxiliary model
based multi-innovation generalized extended stochastic gra-
dient algorithm [14] were proposed to identify the lifted
transfer function model. For more complex NUSD systems
with asynchronous input updating and output sampling, Li et
al. proposed a novel subspace approach to identify the lifted
state space model, and further investigated the problem of
fault detection and isolation [15], [16].
To the best of our knowledge, many identification and
control methods for NUSD systems are proposed based on
the lifted state space model or the lifted transfer function
model. However, these two models both have their own
limitations, i.e., the former suffers from the problem of
causality constraint, and the latter is complex and includes a
large number of parameters. To overcome the limitations of
the lifted models, this paper proposes a novel input-output
representation of general NUSD systems with asynchronous
input updating and output sampling by introducing a time-
varying backward shift operator. The major advantage of
the proposed model lies in its concise structure with fewer
parameters.
The rest of this paper is organized as follows. Sec-
tion II presents the problem formulation, followed by model
derivation in Section III. Section IV gives an identification
algorithm for the proposed novel model. Section V provides
an illustration example. Finally, conclusions are given in
Section VI.
II. PROBLEM FORMULATION
✲♣♣♣♣♣♣♣♣♣♣♣♣♣♣
H
τ
✲
P
✲
S
τ +∆
♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣ ✲
u(kT + t
i
) u(t) y(t)
y(kT + t
i+∆
)
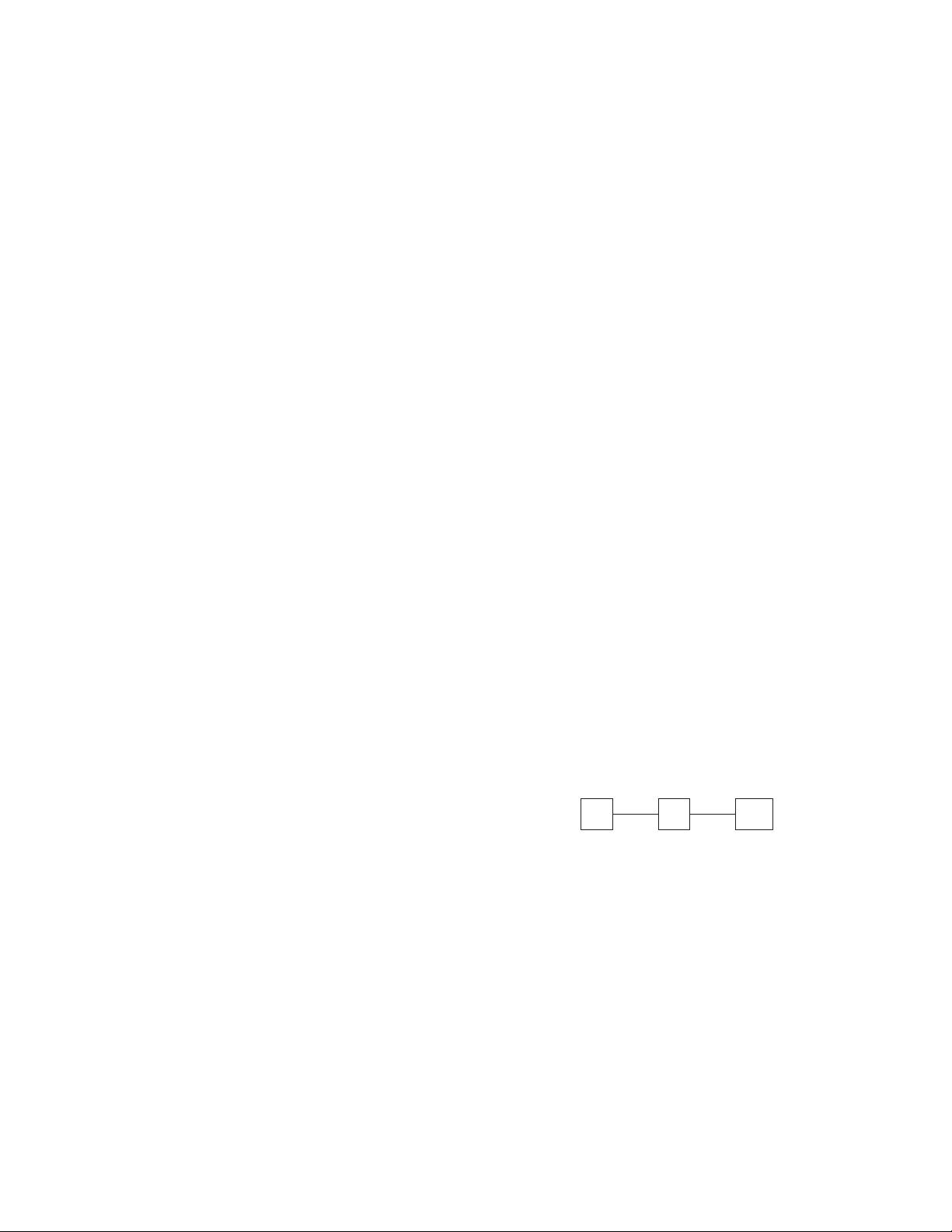
Fig. 1. Non-uniformly sampled-data systems
Consider a class of general NUSD systems as depicted in
Figure 1, where P is a continuous linear time-invariant (LTI)
process with input u( t) and output y(t), described by
˙
x(t) = Ax(t) + Bu(t),
y(t) = Cx(t) + Du(t).
(1)
Here, x(t) ∈ R
n
is the state vector, A, B, C are constant
matrices with appropriate dimensions, and D is a constant.
Furthermore, H
τ
and S
τ +∆
are a non-uniform zero-
order hold and a non-uniform output sampler, respectively,
which are assumed to have a periodic non-uniform updating
and sampling pattern. Over each frame period T , the non-
uniform input sequence u(kT + t
i
) is updated r times with
intervals {τ
1
, τ
2
, ··· , τ
r
}, and the sampling instants are
2016 American Control Conference (ACC)
Boston Marriott Copley Place
July 6-8, 2016. Boston, MA, USA
978-1-4673-8682-1/$31.00 ©2016 AACC 60
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-03-07 上传
2021-05-21 上传
2021-02-23 上传
2021-03-19 上传
2021-01-14 上传

weixin_38607552
- 粉丝: 7
- 资源: 944
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
