
3.1.1 Single thread optimization
We started from optimizing CONV within one thread. CONV
is computationally-intensive which traverses its operands mul-
tiple times for computation. Therefore, it is critical to man-
age the layout of the data fed to the CONV to reduce the
memory access overhead. We first revisit the computation
of CONV to illustrate our memory management scheme. A
2D CONV in CNN takes a 3D feature map (height
×
width
×
channels) and a number of 3D convolution kernels (nor-
mally smaller height and width but the same number of chan-
nels) to convolve to output another 3D tensor. The calculation
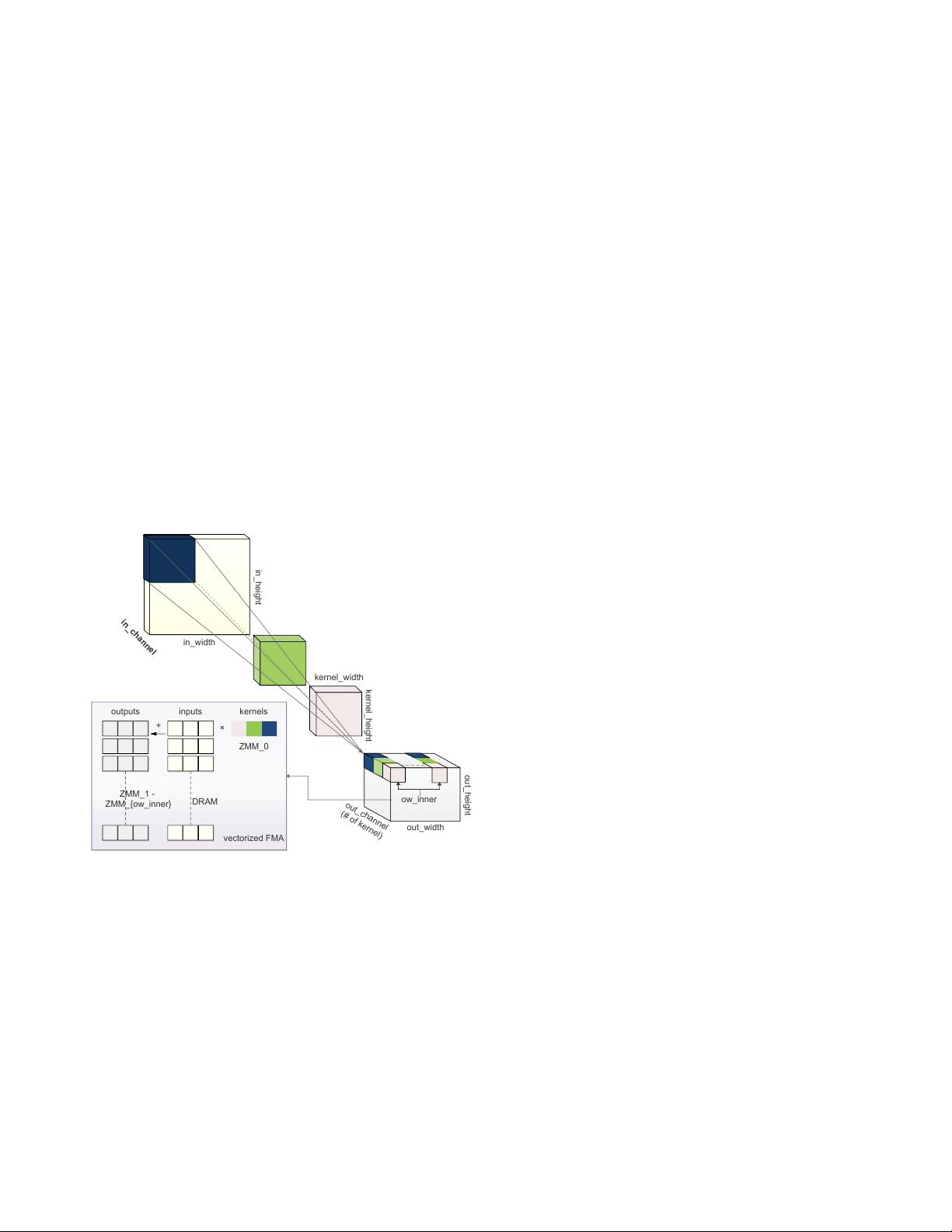
is illustrated in Figure 1, which implies loops of 6 dimen-
sions: in_channel, kernel_height, kernel_width, out_channel,
out_height and out_width. Each kernel slides over the input
feature map along the height and width dimensions, does
element-wise product and accumulates the values to produce
the corresponding element in the output feature map, which
can naturally leverage FMA. The number of kernels forms
out_channel. Note that three of the dimensions (in_channel,
kernel_height and kernel_width) are reduction axes that can-
not be embarrassingly parallelized.
in_height
in_width
kernel_width
kernel_height
out_width
out_height
out_channel
(# of kernel)
in_channel
ow_inner
inputs kernels
ZMM_0
ZMM_1 -
ZMM_{ow_inner}
+
×
DRAM
outputs
vectorized FMA
Figure 1: The illustration of CONV and the efficient imple-
mentation in AVX-512 instructions as an example. There
are three kernels depicted in dark blue, green and light pink.
To do efficient FMA, multiple kernel values are packed into
one
ZMM
register and reused to multiply with different input
values and accumulate to output values in different
ZMM
registers.
We use the conventional notation NCHW to describe the
default data layout, which means the input and output are 4-D
tensors with batch size N, number of channels C, feature map
height H, feature map width W, where N is the outermost and
W is the innermost dimension of the data. The related layout
of kernel is KCRS, in which K, C, R, S stand for the output
channel, input channel, kernel height and kernel width.
Following the common practice [25, 42], we organized
the feature map layout as NCHW[x]c for better memory ac-
cess patterns, in which c is a split sub-dimension of chan-
nel C in super-dimension, and the number x indicates the
split size of the sub-dimension (i.e.
#channels = sizeo f (C)×
sizeo f (c)
, where
sizeo f (c) = x
). The output has the same
layout NCHW[y]c as the input, while the split factor can be
different. Correspondingly, the convolution kernel is orga-
nized in KCRS[x]c[y]k, in which c with split size
x
and k
with split size
y
are the sub-dimensions of input channel C
and output channel K, respectively. It is worth noting that a
significant amount of data transformation overhead needs to
be paid to get the desired layout.
In addition to the dimension reordering, for better uti-
lizing the latest vectorization instructions (e.g. AVX-512,
AVX2, NEON, etc.), we split out_width to ow_outer and
ow_inner using a factor reg_n and move the loop of ow_inner
inside for register blocking. For example, on a CPU fea-
tured AVX-512, we can utilize its 32 512-bit width registers
ZMM
0
− ZMM
31
[26] as follows. We maintain the loop hier-
archy to use one ZMM register to store the kernel data while
others storing the feature map. The kernel values stored in
one
ZMM
register (up to 512 bits, a.k.a, 16 output channels
in float32) are used to multiply with a number of input feature
map values continuously stored in the DRAM via AVX-512F
instructions [26], whose results are then accumulated to other
ZMM
registers storing the output values. Figure 1 illustrates
this idea. For other vectorized instructions, the same idea ap-
plies but the split factor of out_width (i.e. reg_n) may change.
Algorithm 1 summarizes our optimization of CONV in
single thread, which essentially is about 1) dimension order-
ing for friendly memory locality and 2) register blocking
for good vectorization instruction utilization, as in previous
works. However, unlike others, we made it a template in high-
level language (see supplementary material), in which the
block size (
x
,
y
), the number of utilized registers (reg_n), and
the loop-unroll strategy (
unroll_ker
) are easily configurable.
Consequently, the computing logic can be adjusted according
to different CPU architectures (cache size, registered vector
width, etc.) as well as different workloads (feature map size,
convolution kernel size, etc.). This is flexible and enables
graph-level optimization we will discuss later.
3.1.2 Thread-level parallelization
It is a common practice to partition CONV into disjoint pieces
to parallelize among multiple cores of a modern CPU. Kernel
libraries like Intel MKL-DNN usually uses off-the-shelf multi-
threading solution such as OpenMP. However, we observe
that the resulting scalability of the off-the-shelf parallelization
solution is not desirable (Section 4.2.4).
Therefore, we implemented a customized thread pool to
efficiently process this kind of embarrassing parallelization.
4
剩余15页未读,继续阅读

david-yue
- 粉丝: 252
- 资源: 44
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端面试必问:真实项目经验大揭秘
- 永磁同步电机二阶自抗扰神经网络控制技术与实践
- 基于HAL库的LoRa通讯与SHT30温湿度测量项目
- avaWeb-mast推荐系统开发实战指南
- 慧鱼SolidWorks零件模型库:设计与创新的强大工具
- MATLAB实现稀疏傅里叶变换(SFFT)代码及测试
- ChatGPT联网模式亮相,体验智能压缩技术.zip
- 掌握进程保护的HOOK API技术
- 基于.Net的日用品网站开发:设计、实现与分析
- MyBatis-Spring 1.3.2版本下载指南
- 开源全能媒体播放器:小戴媒体播放器2 5.1-3
- 华为eNSP参考文档:DHCP与VRP操作指南
- SpringMyBatis实现疫苗接种预约系统
- VHDL实现倒车雷达系统源码免费提供
- 掌握软件测评师考试要点:历年真题解析
- 轻松下载微信视频号内容的新工具介绍
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


