磁悬浮球数字控制器的MATLAB研究:毕业论文总结
版权申诉
8 浏览量
更新于2024-04-04
收藏 3.49MB PDF 举报
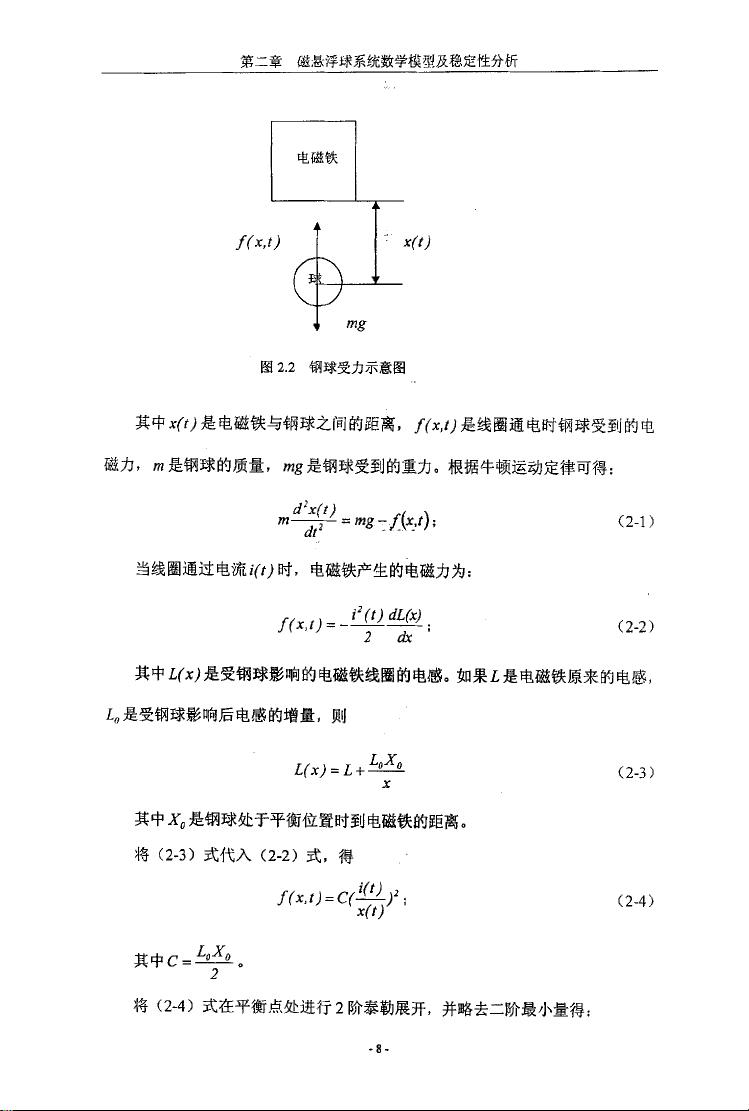
本文主要研究了基于MATLAB的磁悬浮球数字控制器,在对现有文献进行综述分析的基础上,针对磁悬浮球系统的特点和技术要求,提出了一种新的数字控制器设计方案。首先,通过对磁悬浮球系统的建模和动力学分析,确定了系统的数学模型,并针对系统的非线性特点进行了深入分析。然后,基于PID控制器和模糊控制器的特点,提出了一种复合控制策略,以提高系统的性能和稳定性。在此基础上,利用MATLAB软件建立了磁悬浮球数字控制器的仿真模型,并进行了系统的数字控制实验。实验结果表明,所提出的数字控制器具有较好的控制效果和稳定性,能够实现对磁悬浮球系统的精确控制。通过对比分析实验结果,验证了本文提出的数字控制器设计方案的有效性和可行性。最后,结合实验结果对系统的性能进行了评价,并指出了进一步研究和改进的方向。
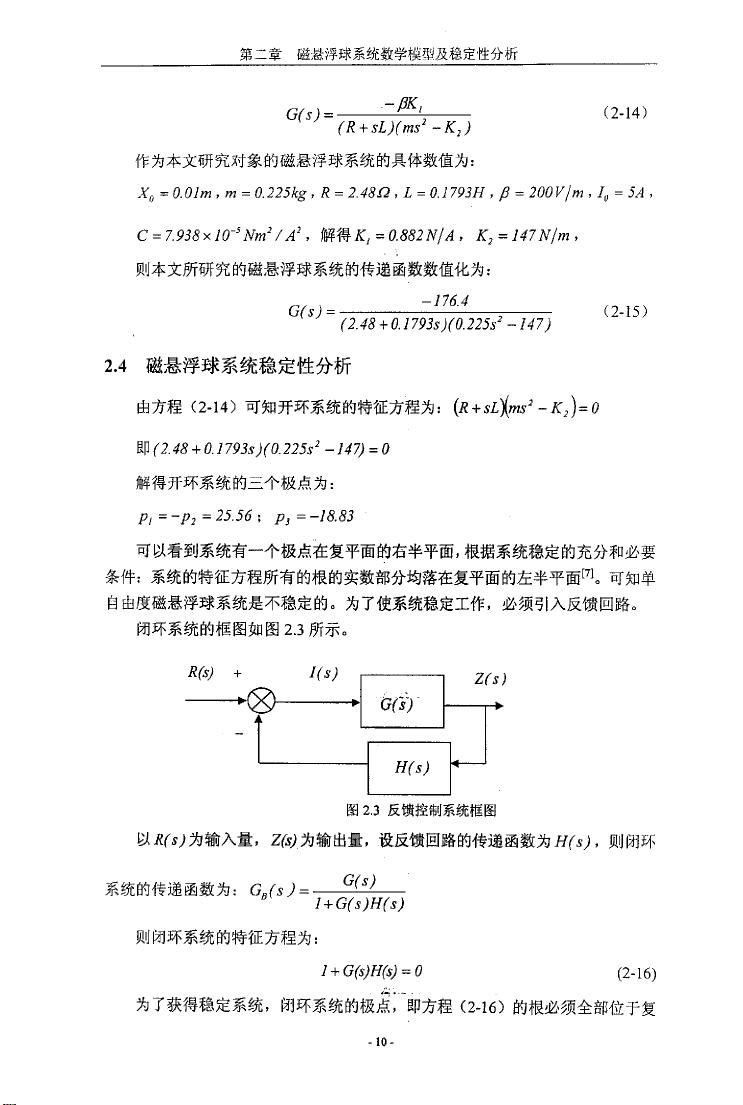
在本文的研究中,首先对磁悬浮球系统的数学模型进行了建立和分析,从而为数字控制器的设计奠定了基础。通过对现有的PID控制器和模糊控制器进行研究和比较,提出了一种复合控制策略,以克服传统控制器在非线性系统中存在的问题。在设计数字控制器的过程中,充分考虑了系统的非线性特点和不确定性,通过优化控制参数和控制策略,使得系统具有更好的动态性能和稳定性。在MATLAB软件中建立了磁悬浮球数字控制器的仿真模型,并进行了数字控制实验。实验结果表明,所提出的数字控制器能够有效地实现对系统的控制,并取得了令人满意的控制效果。
总的来说,本文通过对磁悬浮球数字控制器的研究,提出了一种新的控制器设计方案,有效地改善了系统的性能和稳定性。通过数字控制实验验证了所提出方案的有效性和可行性,为磁悬浮球系统的控制和应用提供了有益的参考。未来的研究方向可以进一步优化控制器的设计参数,提高系统的响应速度和控制精度,以满足更高水平的控制要求。同时,可以考虑引入其他先进的控制策略和方法,不断改进磁悬浮球系统的控制性能,推动其在实际应用中的进一步发展和推广。
¨ G 」
QQ
〕~ ¨ G 」〕~
‘〃
ˉQ」G 〉 H ˉL \〕H 〉
^
J^
G QPH
¨ i
G QQH
y
」
〕」i Jk“w“
G QRH
G QRH G QQH
l〕
G QSH
・\
G QSH Q
剩余55页未读,继续阅读
2023-04-13 上传
595 浏览量
2615 浏览量
2136 浏览量
2472 浏览量
2570 浏览量
1738 浏览量


xox_761617
- 粉丝: 31
 我的内容管理
展开
我的内容管理
展开







最新资源
- 普天身份证阅读器新版二次开发包发布
- C# 实现文件的数据库保存与导出操作
- CkEditor增强功能:轻松实现图片上传
- 掌握DLL注入技术:测试工具使用与探索
- 实现带节假日农历功能的jQuery日历选择器
- Spring循环依赖示例:深入理解与Git代码仓库实践
- ABB PLC液压阀门控制程序开发指南
- 揭秘4核旋风密版626象棋引擎的超牛实力
- HTML5实现的经典游戏:小霸王坦克大战源码分享
- 让Visual Studio兼容APM硬件信息的方法
- Kotlin入门:创建我的第一个应用
- Android语音识别技术研究报告与应用分析
- 掌握JavaScript基础:第8版教程源代码解析
- jQuery制作动态侧面浮动图片广告特效教程
- Android PinView仿支付宝密码输入框源码分析
- HTML5 Canvas制作的围住神经猫游戏源码分享
