超声波+红外避障技术在基础硬件控制课程中的应用
 已收录资源合集
已收录资源合集
需积分: 0 136 浏览量
更新于2024-08-04
收藏 530KB PDF 举报
"基础硬件控制课程-超声波+红外避障"
本课程主要涉及的是基础的硬件控制技术,特别是利用超声波和红外传感器实现避障功能。在学习过程中,你需要掌握以下关键知识点:
1. **超声波传感器工作原理**:
- 超声波传感器通常包含一对探头,一个用于发射超声波,另一个用于接收。
- 发射过程:通过向TRIG引脚提供至少10us的高电平信号,启动测距功能,模块内部会发出8个40kHz的超声波脉冲。
- 接收过程:一旦接收到回波,ECHO引脚就会输出高电平,高电平的持续时间代表超声波来回的时间。
- 计算距离:利用定时器测量高电平持续时间,结合声速(340m/s)的一半,可计算出到障碍物的距离。公式为:距离 = 高电平时间 * 声速(340M/S) / 2。
2. **红外避障传感器工作原理**:
- 红外避障传感器通常包括一个发光管和一个光敏接收管。
- 发射器发出红外光,如果前方有障碍物,光线会被反射回来。
- 光敏接收管检测反射光,如果有障碍物,接收管将检测到信号,引脚输出低电平,指示灯亮;无障碍物时,引脚为高电平,指示灯熄灭。
- 为了延长传感器寿命,红外避障传感器通常配备开关,只有开启后才会工作。
3. **硬件连接与驱动**:
- 在Raspbot小车上,超声波传感器的Echo和Trig引脚分别连接到树莓派主板的18和16引脚,红外避障传感器及开关连接到21, 19, 和22引脚。
- 电机由TT直流减速电机驱动,通过TB6612芯片进行控制。而驱动芯片不直接由树莓派控制,而是通过IIC与STM8单片机通信,由STM8间接驱动电机。
- STM8与树莓派之间的通讯使用了SDA.1和SCL.1引脚,遵循I2C协议。
4. **编程环境**:
- 课程中采用BOARD编码方式,使用Python语言进行编程。
- 关键库文件`YB_Pcb_Car.py`位于程序目录下,负责驱动电机和舵机。
- 程序运行在树莓派上,可以通过提供的镜像找到具体路径。
学习本课程,你需要理解传感器的工作机制,熟悉树莓派的GPIO接口,以及如何编写控制代码来实现避障功能。同时,掌握I2C通讯协议和相关驱动库的使用也是重要的技能之一。通过实践这些内容,你将能够构建一个基本的避障机器人系统。
www.yahboom.com
基础硬件控制课程---超声波+红外避障
1. 学习目标
本次课程我们主要学习如何使用超声波和红外传感器完成超声波+红外避障。
2. 实验原理
超声波模块是利用超声波特性检测距离的传感器。其带有两个超声波探头,分别
用作发射和接收超声波。本次实验我们所使用的模块,其测量的范围是 0-3m。
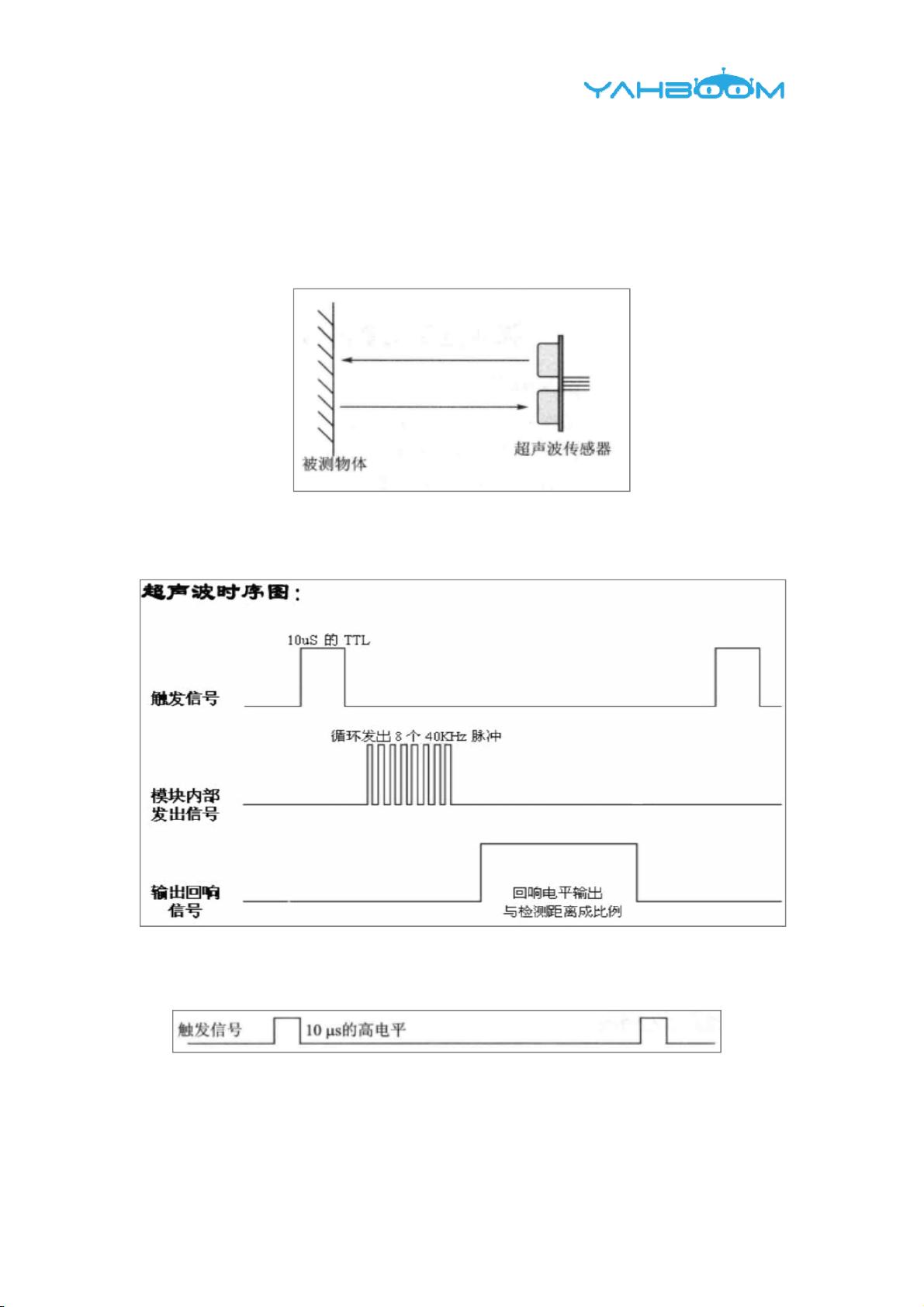
超声波发射和接收示意图
该模块的工作原理:
先向超声波模块的 TRIG 脚输入至少 10us 的高电平信号,触发模块的测距功
能。
测距功能触发后,模块内部将自动发出 8 个 40kHz 的超声波脉冲,并自动
检测是否有信号返回(这一步由模块内部自动完成)。
下载后可阅读完整内容,剩余6页未读,立即下载
2023-01-13 上传
2023-07-25 上传
点击了解资源详情
2022-03-16 上传
点击了解资源详情
2023-07-18 上传
2023-09-17 上传
2017-12-20 上传
2022-06-11 上传

Mrrunsen
- 粉丝: 9583
- 资源: 514
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
