基础课程:超声波+红外避障实现教程
 已收录资源合集
已收录资源合集
需积分: 0 157 浏览量
更新于2024-08-04
1
收藏 482KB PDF 举报
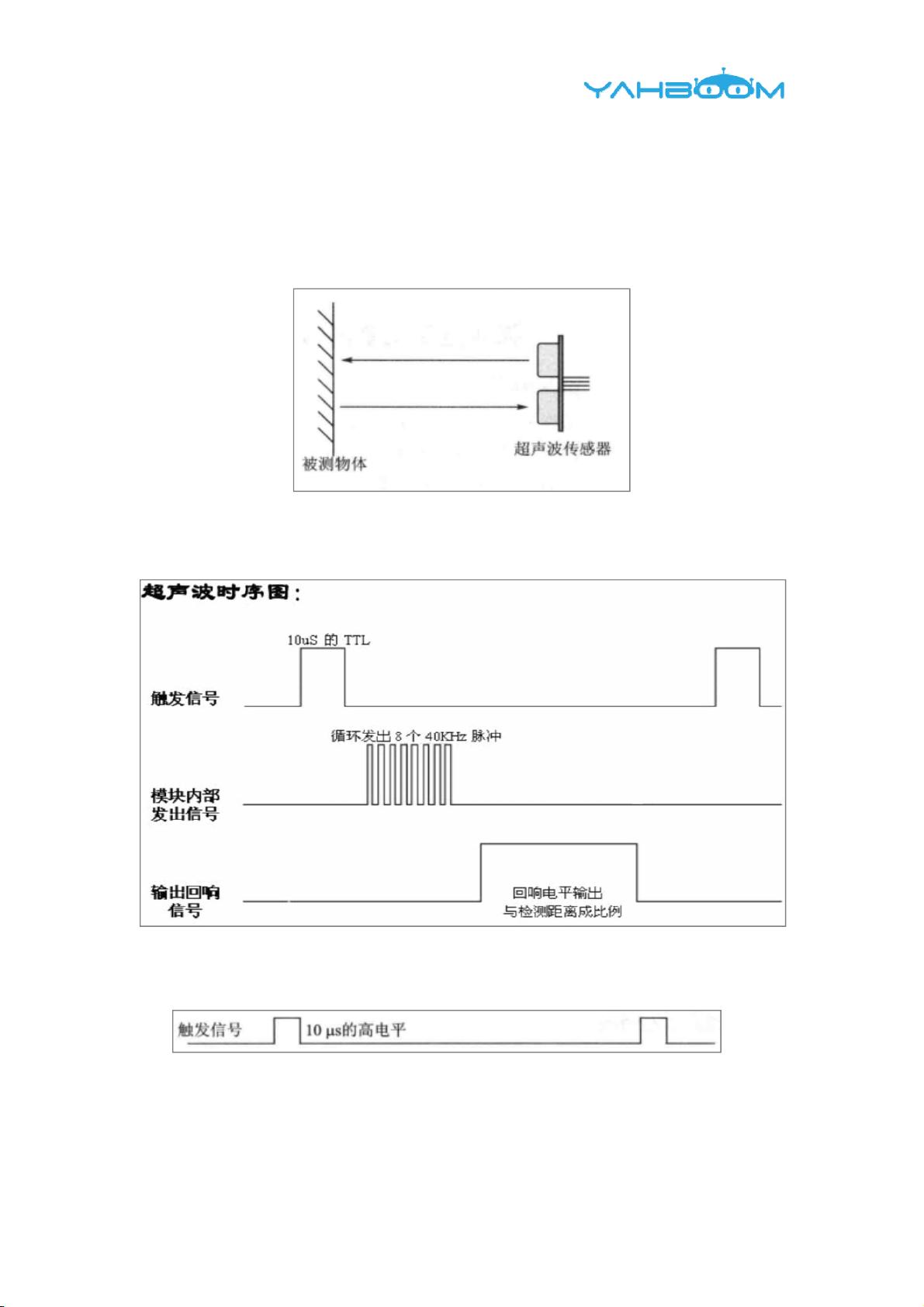
本课程是关于基础硬件控制,重点在于超声波避障技术的应用。学习目标是让学生掌握如何使用超声波和红外传感器实现小车的自主避障功能。超声波模块作为核心组件,它基于超声波原理工作,通过发射和接收40kHz的脉冲来测量物体的距离。当模块的TRIG脚收到至少10us的高电平信号时,它会触发测距功能,然后检测回波信号,ECHO引脚在接收到信号后变为高电平,直到信号结束变为低电平。这个过程中的高电平持续时间与声波往返时间成正比,通过公式计算实际距离。
实验中使用的模块可以测量0-3米的范围,适合于Raspbot小车的避障需求。Raspbot小车的动力系统采用4个TT直流减速电机,这些电机由TB6612驱动芯片控制,但驱动芯片并不直接与树莓派相连,而是通过IIC总线与STM8单片机通信,单片机再控制驱动芯片,确保电机的精确操作。
编程方面,课程采用BOARD编码方式,超声波模块的Echo和Trig引脚分别连接到树莓派主板的18和16引脚,而STM8与树莓派之间的通信使用SDA.1和SCL.1。学生会使用YB_Pcb_Car.py库文件,这是专门针对电机和舵机控制设计的。课程提供的代码示例位于/home/pi/Yahboom_project/Raspbot/2.硬件控制课程/5.超声波避障/超声波避障.ipynb文件中,涉及GPIO库和time库的导入,以及一个Car类来处理电机驱动。
在程序中,首先设置好超声波测距所需的相关GPIO配置,然后编写函数来触发测距并处理回波信号。优化的超声波测距程序会对测得的数据进行处理,确保小车能够根据实时的障碍物距离做出相应的避障动作。
通过这个课程,学生不仅能够了解超声波传感器的工作原理,还能实践编程技能,实现硬件与软件的有效结合,让机器人具备基本的环境感知和自主避障能力。
www.yahboom.com
基础硬件控制课程---超声波避障
1. 学习目标
本次课程我们主要学习如何使用超声波和红外传感器完成超声波+红外避障。
2. 实验原理
超声波模块是利用超声波特性检测距离的传感器。其带有两个超声波探头,分别
用作发射和接收超声波。本次实验我们所使用的模块,其测量的范围是 0-3m。
超声波发射和接收示意图
该模块的工作原理:
先向超声波模块的 TRIG 脚输入至少 10us 的高电平信号,触发模块的测距功
能。
测距功能触发后,模块内部将自动发出 8 个 40kHz 的超声波脉冲,并自动
检测是否有信号返回(这一步由模块内部自动完成)。
下载后可阅读完整内容,剩余4页未读,立即下载
204 浏览量
2596 浏览量
893 浏览量
404 浏览量
385 浏览量
217 浏览量
421 浏览量
2023-05-11 上传
275 浏览量

Mrrunsen
- 粉丝: 9783
- 资源: 515
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多播静态路由引起的循环问题
- WHR系列产品简易说明手册
- java学习文档及学习方法
- 宽带常用端口表宽带常用端口表
- SNMP的工作原理软件开发
- 2008年上半年信息系统项目管理师试题
- RAID介绍、制作及安装系统
- J2EE系统之-hibernate学习总结
- 项目管理知识体系指南2000
- 嵌入式Linux系统开发技术详解-基于ARM 第5章
- J2EE体系之-JSP学习
- FPGA设计软件quartus2使用教程
- J2EE体系统一,关于JDBC
- Linux网络编程 关于linux网络编程的入门书籍
- IIS系统漏洞大全(详细介绍若干年一来所存在的问题和解决方案)
- JavaEye新闻月刊 - 2009年2月 - 总第12期.pdf
