
第 5 页 共 24 页
5
确定参数的对象进行自适应控制上。本文的重点主要是不确定参数非线性动态系
统的辨识与控制。
直接使用控模型的自适应系统得到很广泛的研究。这种系统通常被称为参考
模型自适应控制(MRAC)体统. MRAC 问题的格式化隐性假设是设计者对所讨论的
对象足够熟悉,他可以根据参考模型的输出确定对象的理想行为。MRAC 问题实
质上可以如下(图.1(b))所示:
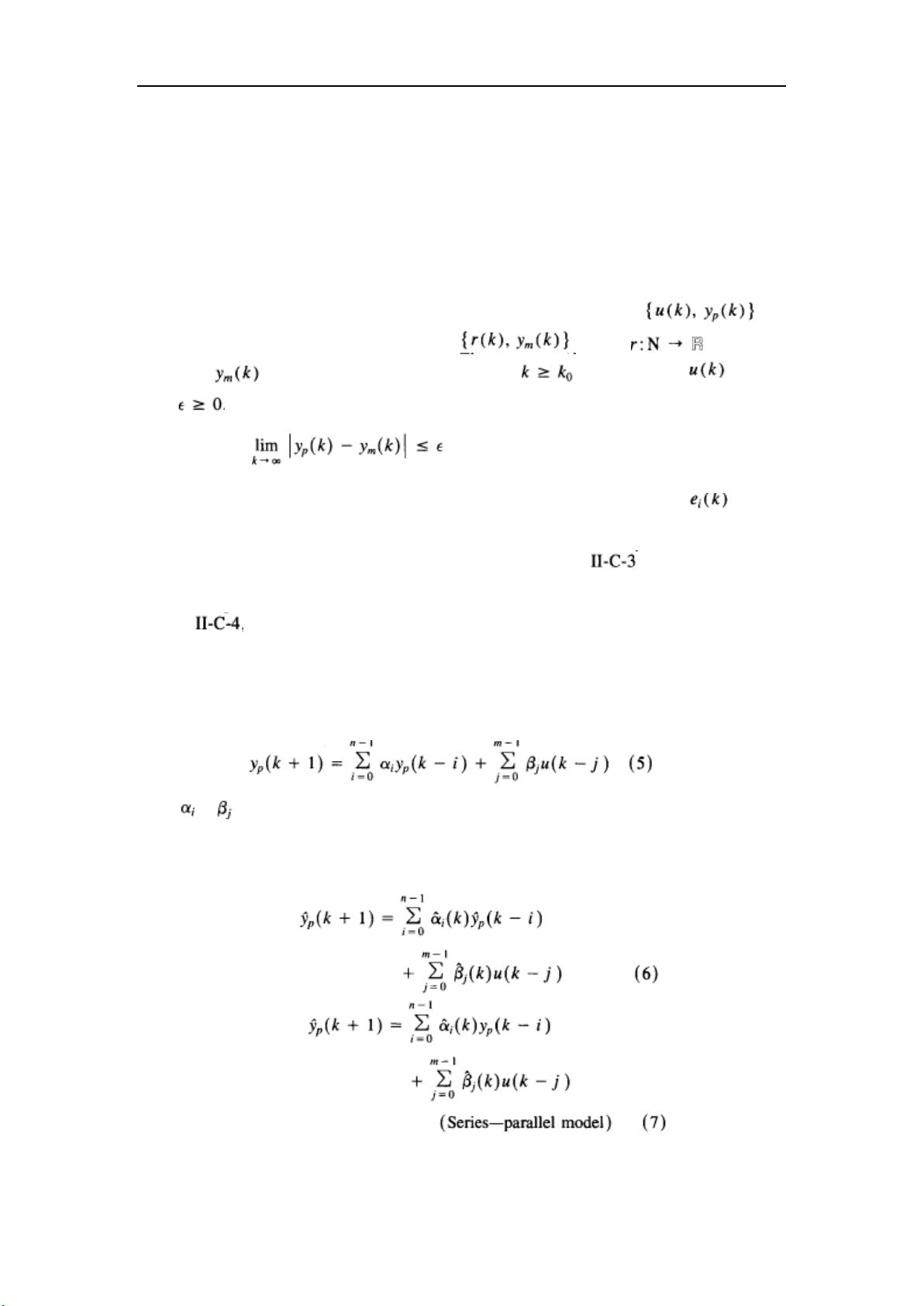
(a) 参考模型自适应控制:控制对象 P,给定输入-输出对 ,
稳定参考模型 M 的确定输入-输出对为 ,其中 是有界函
数,输出 是系统的理想输出。目的是对于 确定控制输入 使得在
常数 下有:
和上面所述的一样,辨识模型的选择(如参数化)以及基于辨识误差 的参数
调整方法是辨识问题的两个主要部分。决定控制器结构,调整参数使得系统输出
与理想输出间的误差最小代表着控制问题的相应部分。 章讲述的是为线
性系统建立辨识模型和控制器结构以及辨识与控制参数调整的一些著名方法。紧
跟着在 章中简单阐述非线性动态系统辨识与控制中遇到的问题。
3.线性系统:对于线性、非时变不确定参数对象,辨识模型的产生目前已
经众所周知。对于一个单输入单输出可控可观系统,方程(4)中的矩阵 A 和向
量 B 和 C 可以用以下方程方式表示:
其中 和 是不确定参数。多输入多输出可控可观系统也可以用相似的方法表示。
这意味着在时间 k+1 时的输出是输入和输出过去值的线性组合。公式(5)激励以
下辨识模型的选择:
并行模型
串行模型
剩余23页未读,继续阅读















