130nm SiGeHBT技术实现的超低功耗200GHz放大器
需积分: 9 167 浏览量
更新于2024-07-15
收藏 114.17MB PDF 举报
"这篇论文详细介绍了使用130纳米硅锗双极晶体管(SiGe HBT)技术设计的一种超低功耗173至207 GHz放大器。该放大器由三个级联的增益单元组成,在实验性的130纳米SiGe HBT工艺中实现,该工艺的峰值fT/fmax达到460/600 GHz。为了实现极其低的静态直流功率消耗,电路设计使得晶体管在正向偏置基发射结电压(VBC)下工作。在1.3伏的电源电压下(VBC约为0.2伏),放大器在180和205 GHz时表现出23.5分贝的峰值增益,具有从173到207 GHz的34 GHz 3-dB带宽。即便在0.7伏的电源电压下(VBC约为0.5伏),放大器仍能在175 GHz时保持18.3分贝的峰值增益,功耗仅为3.2毫瓦。"
这篇文章是《IEEE固态电路杂志》(JSSC)2020年6月刊的一部分,主要探讨了固态电路领域的最新研究成果,特别是针对集成电路的晶体管级设计。在这个研究中,研究人员提出了一种创新的、低功耗的毫米波放大器设计,它在超高的频率范围内工作,如173至207 GHz。使用的器件基于130纳米的硅锗异质结双极晶体管技术,这是一种高速半导体技术,适合高频电路应用。
放大器的架构由三个串联的增益单元组成,这种级联设计有助于提高增益和带宽。关键在于设计电路时考虑了晶体管在正向偏置基发射结电压下操作,这有助于降低静态直流功率损耗。在1.3伏的供电电压下,放大器的性能非常出色,增益达到了23.5分贝,同时保持了相当大的带宽,从173 GHz扩展到207 GHz,3-dB带宽为34 GHz。即使在较低的0.7伏电压下,放大器仍然能够在175 GHz处提供18.3分贝的增益,表明了其在不同工作条件下的鲁棒性。
这个研究不仅展示了高性能的毫米波放大器设计,还强调了通过优化晶体管工作状态来实现低功耗的方法,这对于便携式和远程通信系统,尤其是需要在极高频率下工作的无线设备,具有重要意义。这种技术进步可能对未来的射频和微波电路设计产生深远影响,特别是在5G通信、卫星通信以及雷达系统等领域。
1702 IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 55, NO. 6, JUNE 2020
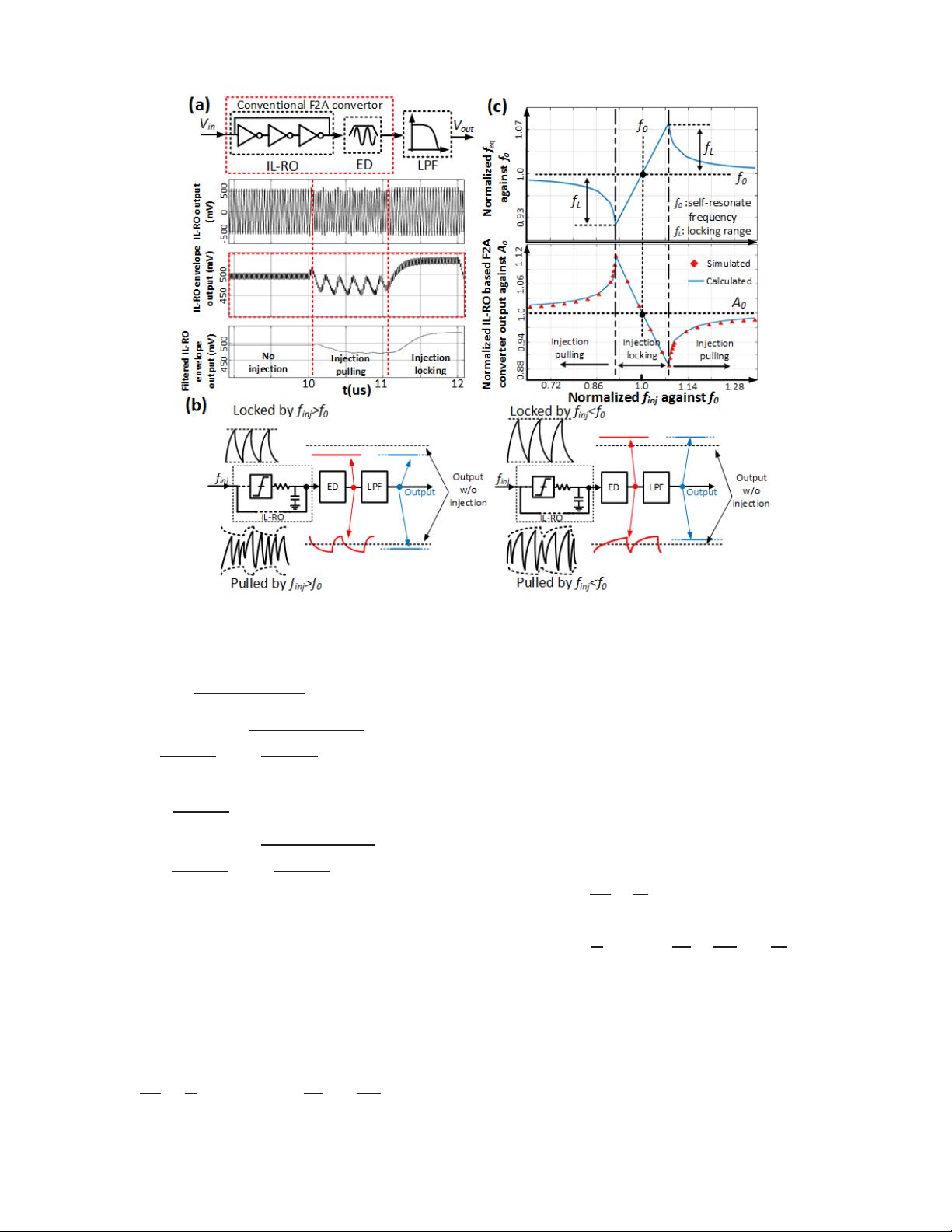
Fig. 5. (a) IL-RO-based F2A converter and the output wave at each node. (b) Illustrations of output wave at nodes in the F2A converter when the IL-RO is
locked/pulled by a signal with f
inj
> f
0
or f
inj
< f
0
. (c) Output amplitude of the F2A converter against the injection signal frequency.
tones with most of the power concentrated at f
inj
and f
∗
1
[30]
f
∗
1
= f
inj
∓
( f
inj
− f
0
)
2
− f
2
L
(2)
P
inj
=
⎛
⎝
f
inj
− f
0
f
L
−
f
inj
− f
0
f
L
2
− 1
⎞
⎠
2
· P (3)
P
1
= 4
f
inj
− f
0
f
L
2
− 1
×
⎛
⎝
f
inj
− f
0
f
L
−
f
inj
− f
0
f
L
2
− 1
⎞
⎠
−2
· P. (4)
where f
L
is the IL range determined by the injection strength
(V
inj
/V
osc
) in one IL-RO. P
inj
, P
1
,andP are the power spec-
tral densities at f
inj
, f
∗
1
and total output power, respectively.
Similarly, the AM-modulated RO output during injection
pulling after the ED and LPF is shown in Fig.5 (a) and (b).
To simplify the analysis and relate the amplitude with
frequency in a similar manner as (1), we define an equivalent
frequency f
eq
as follows:
1
f
eq
=
1
P
⎡
⎣
⎛
⎝
i=1,2,3...
P
i
·
1
f
∗
i
⎞
⎠
+
P
inj
f
inj
⎤
⎦
(5)
where f
∗
i
is the frequency of the i th tone of the IL-RO output
under injection pulling state, P
i
is its corresponding power
spectral density, and P = (
i=1,2,3...
P
i
)+P
inj
. As mentioned
earlier, P
inj
and P
1
would contribute the largest portion of
converter output power.
At the injection pulling state, f
eq
in (5) is actually a
weighted sum of power spectral densities of all tones with its
value lies within ( f
0
− f
L
, f
0
+ f
L
). It can indicate the state
of injection pulling. As injection signal frequency deviates a
lot from f
0
,i.e., f
D
goes larger, the injection pulling effect
gets weaker, and f
eq
approaches f
0
. Using the equivalent
frequency concept, the filtered envelope output during pulling
state can be formulated similarly as (1)
A = K ·
1
f
eq
−
1
f
0
+ A
0
= K ·
⎡
⎣
1
P
⎛
⎝
i=1,2,3...
P
i
f
∗
i
+
P
inj
f
inj
⎞
⎠
−
1
f
0
⎤
⎦
+ A
0
. (6)
As a result, compared to the converter’s output without
injection, the converter would output a smaller/larger ampli-
tude during injection pulling when f
eq
is higher/lower than f
0
.
As shown in Fig. 5(c), using an injection strength of 0.1,
the calculations based on (1)–(6) match well with the sim-
ulation result. We observe that the converter equivalent
frequency f
eq
approaches the free-running frequency f
0
and
the converter output approaches its intrinsic amplitude at free
running when the injection frequency deviates a lot from f
0
,
which indicates the weakening of the pulling effect.
Authorized licensed use limited to: ShanghaiTech University. Downloaded on May 30,2020 at 12:20:29 UTC from IEEE Xplore. Restrictions apply.
剩余302页未读,继续阅读
111 浏览量
216 浏览量
128 浏览量
105 浏览量
104 浏览量
154 浏览量
154 浏览量
105 浏览量
2025-01-09 上传
2025-01-09 上传

netshell
- 粉丝: 11
- 资源: 185
 我的内容管理
展开
我的内容管理
展开







最新资源
- Neat
- pai_v59,matlab中simulink看源码,matlab源码之家
- matlab代码sqrt-HNABEMLAB:二维高频散射问题的快速求解器
- SIXNET冗余的以太网I/O网关ET-GT-ST-3性能详述(中文).zip
- pinterest-tut
- 死神2
- NetworkProcessorsEZchip,EZChip 的芯片架构,微码编码示例的书籍
- js.playgrond:用于学习JavaScript游乐场
- wb715,matlab函数可以查看源码,matlab
- matlab代码sqrt-AnySOS:半定式编程的随时算法
- Julie:网络导航工具
- 大将军连笔王手写板驱动 v8.0 官方版
- protoc-3.10.0-rc-1-win32.zip
- testcafe-devexpress-example:TestCafe自动化测试框架
- pykrx:KRX股票信息搜集
- nsimagegallery6
