英飞凌TC1728单片机CAN控制器详解及功能介绍
英飞凌单片机CAN控制器(TC1728 MultiCAN)是专为入门者设计的学习资料,它详细介绍了一种基于英飞凌技术的CAN控制器。CAN(Controller Area Network)是一种广泛应用于汽车电子、工业自动化和通信领域的通信协议,它支持单线对、无主的、多主竞争的异步串行通信,允许各个节点在一条共享总线上平等通信。
本章节主要分为以下几个部分:
1. **CAN基础知识**:这部分介绍了CAN的基本概念,包括其作为异步串行总线系统的特性,如线与机制、隐性和显性位的概念,以及最大传输速率(1Mbit/s)和最大总线长度(40米)。CAN帧使用NRZ(非归零)编码,通过位填充技术确保节点间的同步。
2. **TC1728 CAN模块概述**:针对TC1728控制器,本节阐述了它的主要组件和功能,包括可用报文对象数量(n_objects)、中断输出线(n_interrupts)、报文挂起寄存器(n_pendings)、报文对象分配列表(n_lists)和CAN节点数量(n_nods)。
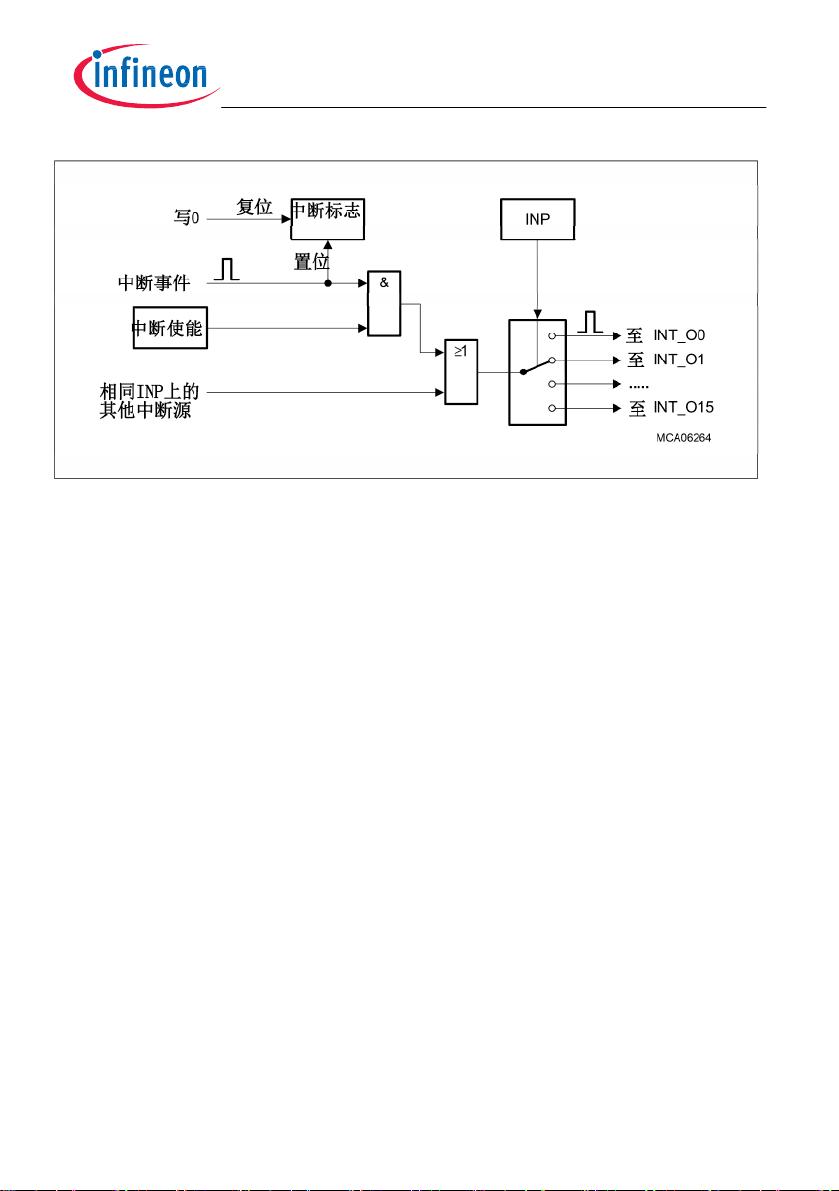
3. **MultiCAN内核功能描述**:这部分详细描述了MultiCAN控制器的核心功能,即它如何处理数据传输、错误检测和管理、以及中断处理等方面。
4. **MultiCAN内核寄存器描述**:涵盖了控制器内部关键寄存器的功能和操作,这些寄存器对实现CAN通信至关重要。值得注意的是,引用寄存器时需加上“CAN_”前缀。
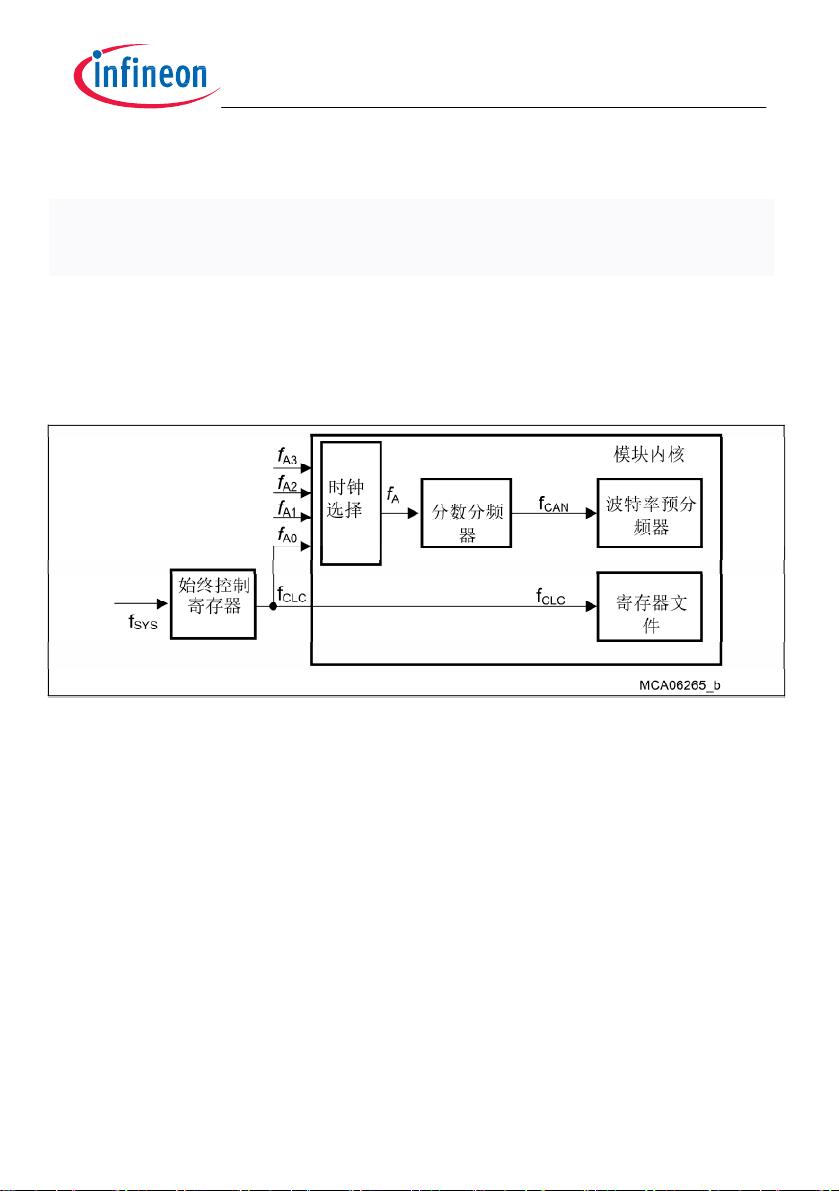
5. **TC1728具体实现**:这部分深入探讨了接口配置、中断控制、地址译码和时钟控制等硬件层面的实现细节,对于理解和使用实际硬件有着重要作用。
通过学习这本用户手册,初学者可以掌握英飞凌TC1728 MultiCAN控制器的基础理论和实际操作技巧,有助于理解和构建基于CAN的通信系统。无论是进行汽车电子系统设计、工业自动化设备还是嵌入式系统开发,理解并熟练运用这类控制器都极其关键。

2021-09-10 上传
2019-09-06 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2013-12-06 上传
122 浏览量
2020-07-30 上传

小陈电子
- 粉丝: 33
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- 天池大数据比赛:伪造人脸图像检测技术
- ADS1118数据手册中英文版合集
- Laravel 4/5包增强Eloquent模型本地化功能
- UCOSII 2.91版成功移植至STM8L平台
- 蓝色细线风格的PPT鱼骨图设计
- 基于Python的抖音舆情数据可视化分析系统
- C语言双人版游戏设计:别踩白块儿
- 创新色彩搭配的PPT鱼骨图设计展示
- SPICE公共代码库:综合资源管理
- 大气蓝灰配色PPT鱼骨图设计技巧
- 绿色风格四原因分析PPT鱼骨图设计
- 恺撒密码:古老而经典的替换加密技术解析
- C语言超市管理系统课程设计详细解析
- 深入分析:黑色因素的PPT鱼骨图应用
- 创新彩色圆点PPT鱼骨图制作与分析
- C语言课程设计:吃逗游戏源码分享
