倒立摆系统控制设计:理论与实践
版权申诉
"自动控制原理课程设计——倒立摆系统控制器设计"
倒立摆系统是一种复杂的非线性控制系统,常用于教学和实验,以演示和解决控制理论中的各种问题。在这个课程设计中,我们将关注一级直线倒立摆的控制器设计。倒立摆的特点是其支点在下方,而重心在上方,这使得它在自然状态下是不稳定的,需要通过精确的控制才能维持平衡。
1.1 倒立摆控制问题的提出
倒立摆按照摆杆数量可分为不同等级,如一级、二级、三级等。多级倒立摆的摆杆间无驱动设备,仅靠物理连接。研究倒立摆控制系统可以帮助我们理解和解决控制领域的关键问题,例如非线性控制、鲁棒性、稳定性、随动控制以及跟踪控制。控制目标是使摆杆迅速到达并保持在期望的平衡位置,同时减少摆动和过大角度、速度的变化。
1.2 倒立摆的控制方法
控制系统通过传感器获取小车和摆杆的实际位置信息,与期望值对比后,经过控制算法计算出控制量,该量经过数模转换驱动直流电机。直流电机通过皮带驱动小车在固定轨道上移动,摆杆一端固定在小车上,可绕此点在垂直平面内自由摆动。控制力作用于小车,使其沿轨道前移或后退,从而调整摆杆的角度。
在本次设计中,我们采用牛顿-欧拉方法构建直线一级倒立摆的数学模型。模型建立后,通过开环响应分析进行系统分析,并结合古典控制理论,利用Matlab/Simulink软件进行控制器设计。设计中涉及的主要控制策略包括根轨迹法、频域法和PID控制器。
2. 直线倒立摆数学模型的建立
直线一级倒立摆由直线运动部分和一级摆体构成,通常具有一个自由度的小车沿导轨水平移动,摆体组件装载在小车上。建模方法主要有机理建模和实验建模。实验建模涉及输入信号的设计、输出信号的准确检测以及数学建模算法的研究。对于小车倒立摆,我们可以根据物理机制和动力学原理来建立系统的数学模型,描述其动态行为。
在这个过程中,首先需要对系统进行动力学分析,考虑到重力、惯性、摩擦等因素,建立小车和摆杆的运动方程。然后,这些方程可以被转化为状态空间形式,为控制器的设计提供基础。接下来,我们将利用根轨迹法分析系统的稳定性,并通过频域分析了解系统的频率响应特性。最后,PID控制器将被设计并应用于系统,以优化其性能,提高控制精度和稳定性。
通过这样的设计和仿真,学生能够深入理解控制理论的实际应用,同时掌握如何分析和解决复杂非线性系统的控制问题。在实际操作中,可能还需要考虑实际系统中的噪声、传感器误差以及实时控制的挑战,进一步优化控制器参数,确保系统在实际环境下的稳定运行。
倒立摆系统的控制器设计
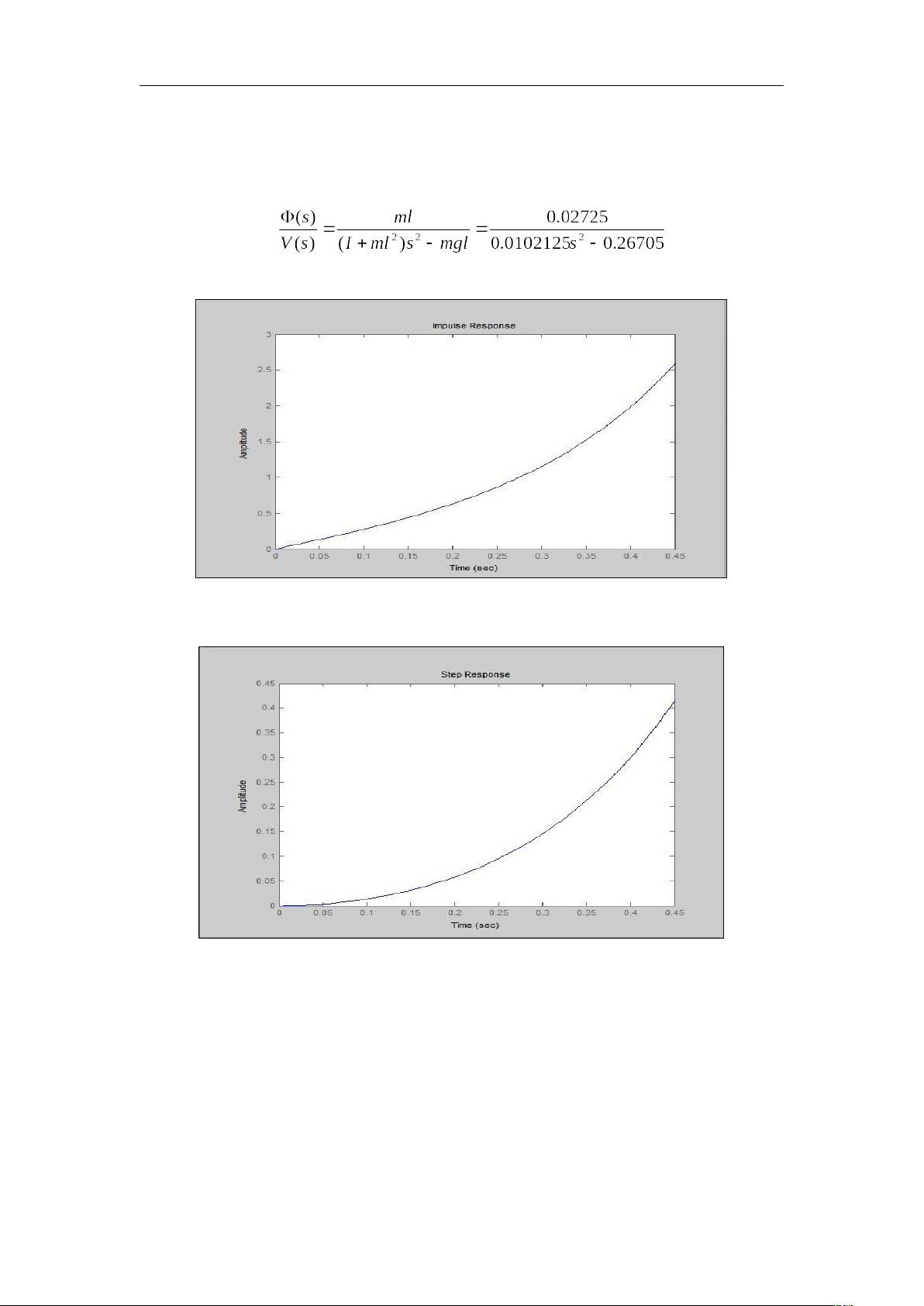
本系统采用以小车的加速度作为系统的输入,摆杆角度为输出响应,此时的传
递函数为
(3-1)
图 3.1 摆杆角度的单位脉冲响应曲线图
图3.2 摆杆角度的单位阶跃响应曲线图
3.2 小车位置为输出响应的时域分析
采用以小车的加速度作为系统的输入,小车位置为响应,则此时的传递函数
为
第 7 页 共 34 页
剩余33页未读,继续阅读
2021-10-08 上传
2023-11-17 上传
2023-07-29 上传
2021-10-14 上传
2023-07-04 上传
2024-10-24 上传
2021-10-05 上传

zpl19880112
- 粉丝: 9
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Raspberry Pi OpenCL驱动程序安装与QEMU仿真指南
- Apache RocketMQ Go客户端:全面支持与消息处理功能
- WStage平台:无线传感器网络阶段数据交互技术
- 基于Java SpringBoot和微信小程序的ssm智能仓储系统开发
- CorrectMe项目:自动更正与建议API的开发与应用
- IdeaBiz请求处理程序JAVA:自动化API调用与令牌管理
- 墨西哥面包店研讨会:介绍关键业绩指标(KPI)与评估标准
- 2014年Android音乐播放器源码学习分享
- CleverRecyclerView扩展库:滑动效果与特性增强
- 利用Python和SURF特征识别斑点猫图像
- Wurpr开源PHP MySQL包装器:安全易用且高效
- Scratch少儿编程:Kanon妹系闹钟音效素材包
- 食品分享社交应用的开发教程与功能介绍
- Cookies by lfj.io: 浏览数据智能管理与同步工具
- 掌握SSH框架与SpringMVC Hibernate集成教程
- C语言实现FFT算法及互相关性能优化指南
