基于LabVIEW8.20与PID的静电悬浮控制系统设计与性能验证
需积分: 9 164 浏览量
更新于2024-08-12
收藏 306KB PDF 举报
该篇文章《材料静电悬浮控制系统的设计与应用 (2009年)》主要介绍了作者杨晓光、鲁晓宇和曹崇德在西北工业大学理学院研发的一种新型静电悬浮控制系统。该系统基于静电悬浮的基本原理,即通过利用静电场中带电样品的库仑力来抵消其重力,实现样品在无容器状态下悬浮。文章特别强调了系统的创新之处,即采用了 LabVIEW8.20这款虚拟仪器编程软件以及PID(比例-积分-微分)控制技术。
系统的核心组成部分包括悬浮电极、直流高压稳压电源、高精度位置灵敏探测器和控制系统。其中,位置灵敏探测器使用的是980纳米的InGaAs应变量子阱激光器,确保了极高的探测精度,小于0.5微米。这些部件协同工作,使得系统能够实时监测并调整悬浮物体的位置,实现精确控制。
模拟结果显示,该系统设计得相当高效,能够使质量仅为0.037克的铜球、铝球和玻璃球在30秒内达到稳定悬浮状态。即使悬浮样品受到脉冲扰动,也能在大约17秒的时间内迅速恢复到稳定悬浮。这证明了系统不仅能够维持静态悬浮,还具有良好的动态响应能力,对于材料在超真空环境下,特别是在过冷条件下进行制备和凝固理论研究具有重要的应用价值。
通过将PID控制和虚拟仪器技术相结合,控制系统实现了自动调节输出电压,使得整个过程自动化且精确,显著提高了悬浮控制的效率和稳定性。这项研究成果不仅提升了静电悬浮技术的实际应用能力,也为相关领域的研究提供了新的思路和技术支持。
2009
年
6
月
第
27
卷第
3
期
西北工业大学学报
June
2009
Vo
l.
27
No.
3
Journal
of
Northwestern
Polytechnical
University
材料静电悬浮控制系统的设计与应用
杨晓光,鲁晓宇,曹崇德
(西北工业大学理学院,陕西西安
710072)
摘
要:文章给出一种静电悬浮控制系统设计方案。此方案基于静电悬浮基本原理,综合最新的虚
拟仪器编程软件
Lab
VIEW8.
20
和
PID
控制,可以实现物体的静电悬浮,并完成对悬浮物体的控
制。模拟结果表明,依照此方案设计的静电悬浮系统能够使质量为
0.037
g
的铜球、铝球和玻璃球
在
30
s
内达到稳定悬浮,当悬浮样品受到脉冲扰动时能在短时间内使其回复到稳定悬浮状态。
关键词:元容器效应,静电悬浮,
LabVIEW8.20
,
PID
控制
中国分类号
:TP274
文献标识码
:A
文章编号
:1000-2758(2009)03-0342-05
静电悬浮是一种利用静电场中带电样品的库仑
力抵消样品重力,从而实现样品无容器状态的方
法
[1]
。作为一种新型的空间环境模拟技术,静电悬浮
具有可悬浮物体尺度大、适用范围广、易于实现超高
真空环境等优点,因此,静电悬浮技术的研究对于深
过冷条件下的材料制备口,可与凝固理论研究
[4-6]
具
有重要意义。本文的设计方案是将
PID
控制方法和
虚拟仪器
Lab
VIEW8.
20
有效结合,通过设置接口
设备控制输入和输出信号,并利用高性能计算机对
信号进行处理[气模拟结果表明,依照此方案设计的
静电悬浮系统能够使质量为
0.037
g
的铜球、铝球
和玻璃球在
30
s
内达到稳定悬浮,当悬浮样品受到
脉冲扰动时能在约
17
s
的短时间内使其回复到稳
定悬浮状态。
1
设计方案
1.
1
系统组成
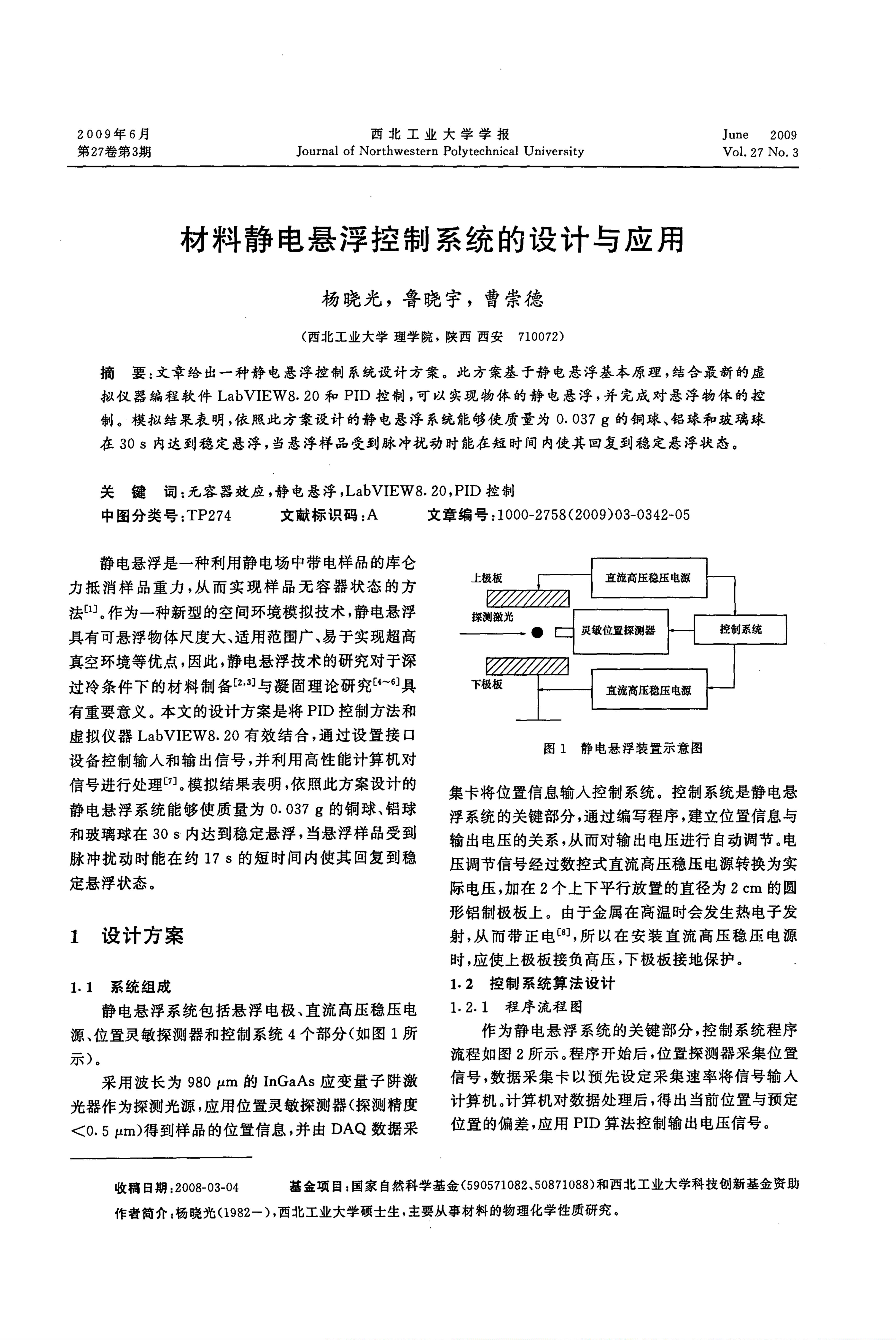
静电悬浮系统包括悬浮电极、直流高压稳压电
源、位置灵敏探测器和控制系统
4
个部分(如图
1
所
示〉。
采用波长为
980μm
的
InGaAs
应变量子阱激
光器作为探测光源,应用位置灵敏探测器(探测精度
<0.5μm)
得到样品的位置信息,并由
DAQ
数据采
上极板
直流高压稳压电源
探测激光
••
灵敏位置探测器\.一斗
控制系统
下极板
直流高压稳压电源
图
l
静电悬浮装置示意图
集卡将位置信息输入控制系统。控制系统是静电悬
浮系统的关键部分,通过编写程序,建立位置信息与
输出电压的关系,从而对输出电压进行自动调节。电
压调节信号经过数控式直流高压稳压电源转换为实
际电压,加在
2
个上下平行放置的直径为
2cm
的圆
形铝制极板上。由于金属在高温时会发生热电子发
射,从而带正电阳,所以在安装直流高压稳压电源
时,应使上极板接负高压,下极板接地保护。
1.2
控制系统算法设计
1.
2.
1
程序流程图
作为静电悬浮系统的关键部分,控制系统程序
流程如图
2
所示。程序开始后,位置探测器采集位置
信号,数据采集卡以预先设定采集速率将信号输入
计算机。计算机对数据处理后,得出当前位置与预定
位置的偏差,应用
PID
算法控制输出电压信号。
收稿日期,
2008-03-04
基金项目
g
国家自然科学基金
(590571082
、
50871088)
和西北工业大学科技创新基金资助
作者简介
s
杨晓光
0982-)
,西北工业大学硕士生,主要从事材料的物理化学性质研究。
下载后可阅读完整内容,剩余4页未读,立即下载
2019-09-26 上传
2020-03-11 上传
2019-10-13 上传
2023-08-07 上传
2023-10-25 上传
2024-01-18 上传
2023-06-01 上传
2023-07-07 上传
2023-09-14 上传

weixin_38607026
- 粉丝: 9
- 资源: 914
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++多态实现机制详解:虚函数与早期绑定
- Java多线程与异常处理详解
- 校园导游系统:无向图实现最短路径探索
- SQL2005彻底删除指南:避免重装失败
- GTD时间管理法:提升效率与组织生活的关键
- Python进制转换全攻略:从10进制到16进制
- 商丘物流业区位优势探究:发展战略与机遇
- C语言实训:简单计算器程序设计
- Oracle SQL命令大全:用户管理、权限操作与查询
- Struts2配置详解与示例
- C#编程规范与最佳实践
- C语言面试常见问题解析
- 超声波测距技术详解:电路与程序设计
- 反激开关电源设计:UC3844与TL431优化稳压
- Cisco路由器配置全攻略
- SQLServer 2005 CTE递归教程:创建员工层级结构
