Java G1垃圾回收:Garbage-First 实现高吞吐量与实时目标
需积分: 9 198 浏览量
更新于2024-09-17
收藏 162KB PDF 举报
GarbageFirst是Sun Microsystems公司开发的一款针对多处理器系统且内存容量较大的服务器环境的垃圾回收器。它的设计目标是实现软实时性能,并在高吞吐量的同时,尽可能减少对程序运行的中断。GarbageFirst采用了一种全局并行操作的方式,将全局标记(global marking)与对象的创建和修改(mutation)过程同时进行,这显著减少了因垃圾收集导致的暂停时间,提高了系统的并发性和响应性。
其核心特性包括:
1. **并发标记**:GarbageFirst采用并发标记技术,这意味着垃圾收集过程中可以继续执行其他线程,从而确保“收集完整性”,即所有可达的对象都能被正确标记,不会漏掉任何可回收的内存区域。这种并发处理方式提高了整体的系统效率。
2. **识别和准备回收区域**:通过并发标记,GarbageFirst能够实时检测出哪些内存区域已经不再被引用,这些区域被称为“准备回收区域”。这样,当收集时机成熟时,系统就可以开始进行并行的内存清理和压缩(compacting evacuation),进一步释放内存空间。
3. **并行执行内存清理**:为了进一步提高吞吐量,GarbageFirst在多处理器系统上并行执行内存清理过程。这不仅减少了单次清理所需的时间,还使得垃圾收集对整体系统的影响降到最低,保持了系统的稳定性和响应速度。
4. **目标定位**:GarbageFirst特别适合于需要高实时性和高吞吐量的应用场景,如大数据处理、云计算等,它旨在提供一个能在多核环境中高效工作的垃圾收集策略。
5. **语言支持**:这一特性主要应用于Java平台,因为G1 GC(Garbage-First GC)是Java垃圾回收器的一部分,专为了解决大规模并发和内存管理问题而设计。
GarbageFirst是一种创新的垃圾回收算法,它通过并发技术和并行化内存管理来优化大型服务器环境下的内存使用和性能,对于追求高效率、低延迟的现代IT系统至关重要。理解并利用好G1 GC,可以显著提升应用程序在多核环境下运行的稳定性和资源利用率。
empty
empty
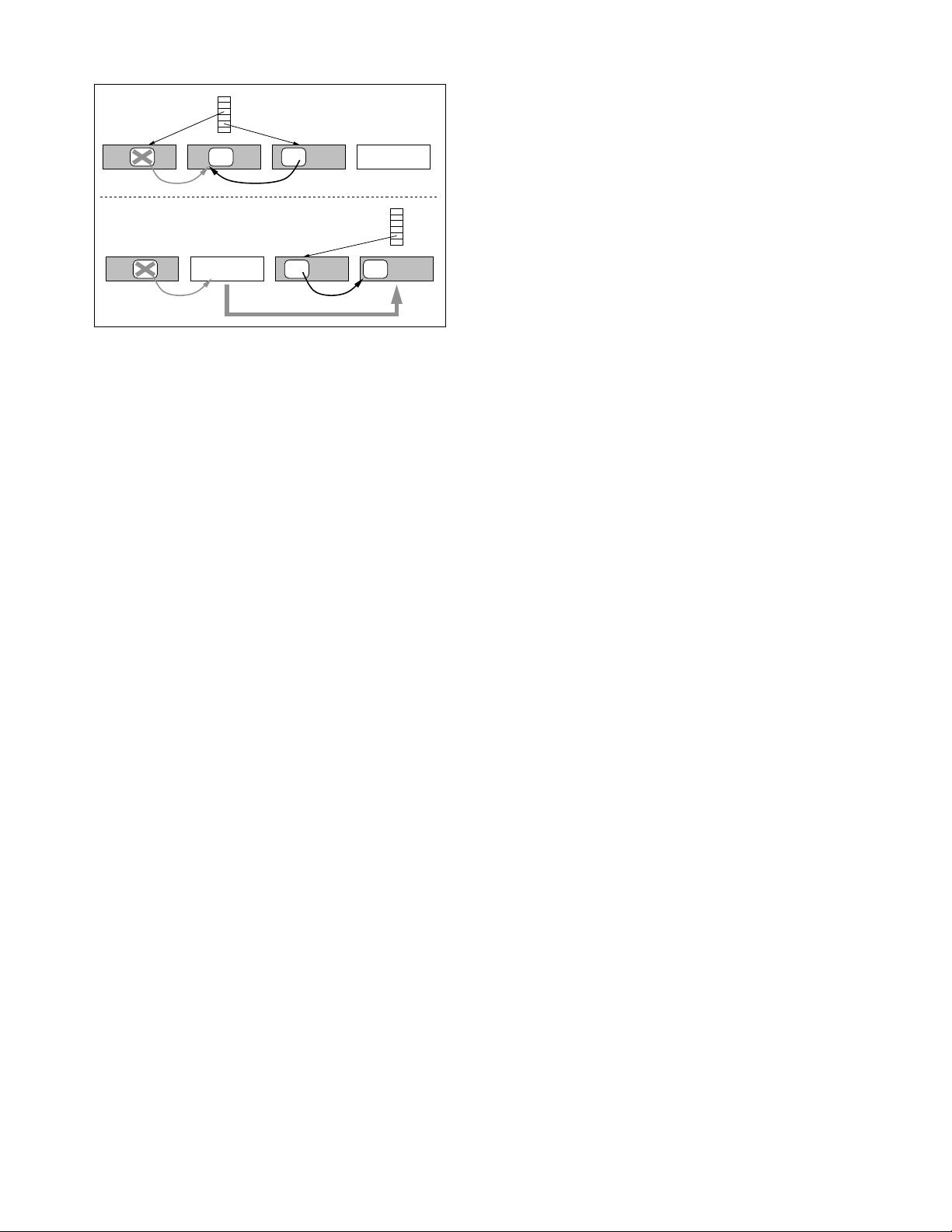
R0 R1 R2 R3
RemSet1
R0 R1 R2 R3
RemSet3
(a)
(b)
GC
a
b
c
c
b
a
Figure 1: Remembered Set Operation
If a multithreaded program is running on a multiprocessor
machine, using a sequential garbage collector can create a
performance bottleneck. We therefore strive to parallelize
the operations of an evacuation pause as much as possible.
The first step of an evacuation pause is to sequentially
choose the collection set (section 3 details the mechanisms
and heuristics of this choice). Next, the main parallel phase
of the evacuation pause starts. GC threads compete to claim
tasks such as scanning pending log buffers to update remem-
bered sets, scanning remembered sets and other root groups
for live objects, and evacuating the live objects. There is no
explicit synchronization among tasks other than ensuring
that each task is performed by only one thread.
The evacuation algorithm is similar to the one reported by
Flood et al. [18]. To achieve fast parallel allocation we use
GCLABs, i.e. thread-local GC allocation buffers (similar
to mutator TLABs). Threads allocate an object copy in
their GCLAB and compete to install a forwarding pointer
in the old image. The winner is responsible for copying
the object and scanning its contents. A technique based on
work-stealing [1] provides load balancing.
Figure 1 illustrates the operation of an evacuation pause.
Step A shows the remembered set of a collection set region
R1 being used to find pointers into the collection set. As will
be discussed in section 2.6, pointers from objects identified
as garbage via concurrent marking (object a in the figure)
are not followed.
2.4 Generational Garbage-First
Generational garbage collection [34, 26] has several ad-
vantages, which a collection strategy ignores at its peril.
Newly allocated objects are usually more likely to become
garbage than older objects, and newly allocated objects are
also more likely to be the target of pointer modifications,
if only because of initialization. We can take advantage of
both of these properties in Garbage-First in a flexible way.
We can heuristically designate a region as young when it is
chosen as a mutator allocation region. This commits the re-
gion to be a member of the next collection set. In return for
this loss of heuristic flexibility, we gain an important benefit:
remembered set processing is not required to consider mod-
ifications in young regions. Reachable young objects will be
scanned after they are evacuated as a normal part of the
next evacuation pause.
Note that a collection set can contain a mix of young and
non-young regions. Other than the special treatment for
remembered sets described above, both kinds of regions are
treated uniformly.
Garbage-First runs in two modes: generational and pure
garbage-first. Generational mode is the default, and is used
for all performance results in this paper.
There are two further “submodes” of generational mode:
evacuation pauses can be fully or partially young. A fully-
young pause adds all (and only) the allocated young regions
to the collection set. A partially-young pause chooses all
the allocated young regions, and may add further non-young
regions, as pause times allow (see section 3.2.1).
2.5 Concurrent Marking
Concurrent marking is an important component of the
system. It provides collector completeness without impos-
ing any order on region choice for collection sets (as, for ex-
ample, the Train algorithm of Hudson and Moss [22] does).
Further, it provides the live data information that allows
regions to be collected in “garbage-first” order. This section
describes our concurrent marking algorithm.
We use a form of snapshot-at-the-beginning concurrent
marking [36]. In this style, marking is guaranteed to iden-
tify garbage objects that exist at the start of marking, by
marking a logical “snapshot” of the object graph existing at
that point. Objects allocated during marking are necessar-
ily considered live. But while such objects must be consid-
ered marked, they need not be traced: they are not part of
the object graph that exists at the start of marking. This
greatly decreases concurrent marking costs, especially in a
system like Garbage-First that has no physically separate
young generation treated specially by marking.
2.5.1 Marking Data Structures
We maintain two marking bitmaps, labeled previous and
next. The previous marking bitmap is the last bitmap in
which marking has been completed. The next marking bitmap
may be under construction. The two physical bitmaps swap
logical roles as marking is completed. Each bitmap contains
one bit for each address that can be the start of an ob-
ject. With the default 8-byte object alignment, this means
1 bitmap bit for every 64 heap bits. We use a mark stack
to hold (some of) the gray (marked but not yet recursively
scanned) objects.
2.5.2 Initial Marking Pause/Concurrent Marking
The first phase of a marking cycle clears the next marking
bitmap. This is performed concurrently. Next, the initial
marking pause stops all mutator threads, and marks all ob-
jects directly reachable from the roots (in the generational
mode, initial marking is in fact piggy-backed on a fully-
young evacuation pause). Each heap region contains two
top at mark start (TAMS) variables, one for the previous
marking and one for the next. We will refer to these as
the previous and next TAMS variables. These variables are
used to identify objects allocated during a marking phase.
These objects above a TAMS value are considered implic-
itly marked with respect to the marking to which the TAMS
variable corresponds, but allocation is not slowed down by
marking bitmap updates. The initial marking pause iterates
over all the regions in the heap, copying the current value of
top in each region to the next TAMS of that region. Steps
A and D of figure 2 illustrate this. Steps B and E of this
剩余11页未读,继续阅读
2024-11-09 上传
2024-11-09 上传
2024-11-09 上传
2024-11-09 上传

hillMover
- 粉丝: 1
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
