数字信号处理:插值与降采样教程
需积分: 10 170 浏览量
更新于2024-07-19
1
收藏 2.6MB PDF 举报
"Interpolation and decimation of digital signals"
在数字信号处理领域,多速率信号处理的概念正在变得越来越重要,这涉及到使用不止一个采样率的信号处理算法。本文提供了一个关于应用于抽取(decimation)和插值(interpolation)系统的多速率数字信号处理的教程式综述。首先,基于采样定理建立了一个理论模型,然后展示了如何设计各种结构来有效地实现这些系统。此外,讨论了线性时不变组件(即数字滤波器)的设计技术,并提出了多级实现以提高效率的理念。
1. 采样与多速率信号处理
采样是将连续信号转化为离散数据点的过程,根据奈奎斯特定理,为了无失真地恢复原始信号,采样频率必须至少是被采样信号最高频率的两倍。多速率信号处理涉及不同采样率之间的转换,这对于信号的压缩、扩展以及在不同速率系统间传递信号非常关键。
2. 插值与抽取
插值是一种增加信号采样率的方法,通过在现有样本之间插入新的样本点,从而提高信号的分辨率。而抽取则是降低采样率的过程,通常通过丢弃某些采样点来实现。这两个过程都伴随着信号的滤波操作,以避免引入失真。
3. 数字滤波器设计
在多速率处理中,数字滤波器是核心组件,用于去除或保留特定频率成分。设计滤波器时,通常考虑线性相位、稳定性、频率响应以及计算效率等因素。IIR(无限 impulse response)和FIR(有限 impulse response)滤波器是两种常见的数字滤波器类型,它们各有优缺点,可以根据具体应用选择。
4. 结构优化与多级实现
为了提高系统效率,可以采用多级结构来实现插值和抽取。这种分阶段的方法可以分解复杂滤波器,减少计算量,同时保持良好的性能。例如,通过预滤波器和后滤波器的组合,可以简化主滤波器的设计,同时降低对硬件资源的需求。
5. 总结
本文全面概述了多速率信号处理在数字信号插值和抽取中的应用,不仅提供了理论基础,还讨论了实际系统设计中的关键技术和策略。这些概念和技术广泛应用于通信、音频处理、图像处理等多个领域,对于提升系统的性能和效率具有重要意义。
CROCHIERE AND RABINER: INTERPOLATION AND DECIMATION
OF
SIGNALS
305
and from (1 3) y
(m)
can be expressed in terms of
u(k)
as
y(m)
=
v(Mm).
(45)
Combining
(44)
and (45) gives
a0
y(m)
=
h(Mm
-
rL)x(r)
(46)
r=-a0
and making the change of variables
r=
E]
-
n
and applying (3
7)
gives
(47)
It is seen
that
(48) corresponds to the general form of the
time-varying digital-todigital conversion system described by
(6) and that the time-varying unit sample response
g,(n)
can
be expressed as
gm(n)
=
h
(nL
+
mM
L),
for all
m
and all
n
(49)
where
h(k)
is
the time-invariant unit sample response of the
low-pass digital filter at the sampling rate
LF
[
13
I
.
Similarly, by considering the transform relationships of the
individual integer decimttion and interpolation systems, the
output spectrum
Y(eiw
)
can be determined in terms
of
the input spectrum
X(elw)
and the frequency response of the
filter
H(ejW").
From (32) it is seen that
V(eiw")
can be ex-
pressed in terms of
X(eiw)
and
H(eiW")
as
J7(ei"")
=
H(eiw")
X
(ejw'IL
1
(50)
and from (21)
Y(eiw')
can be expressed in terms of V(eiw")as
When
H(ejW')
closely approximates the ideal characteristic
of (42) it
is
seen that this expression reduces to
,
for
lw'l
<
min
(a,
aM/L)
(52)
otherwise
Thus far, we have developed the general system for sampling
rate conversion of low-pass signals by arbitrary rational factors
L/M.
It was shown that the process
of
sampling rate conver-
sion could be modeled as a linear, periodically time-varying
system, and that the unit sample response of this system,
g,(n)
could be expressed
in
terms
of
the unit sample response
h(k)
of a time-invariant digital filter designed for the highest
system sampling rate
LF.
D.
Sampling Rate Conversion
of
Bandpass Signals
In the preceding sections
it
was assumed that the signals
that
we are dealing with are low-pass signals and therefore the filters
-277
-H
0
H
2H
w'
(e
1
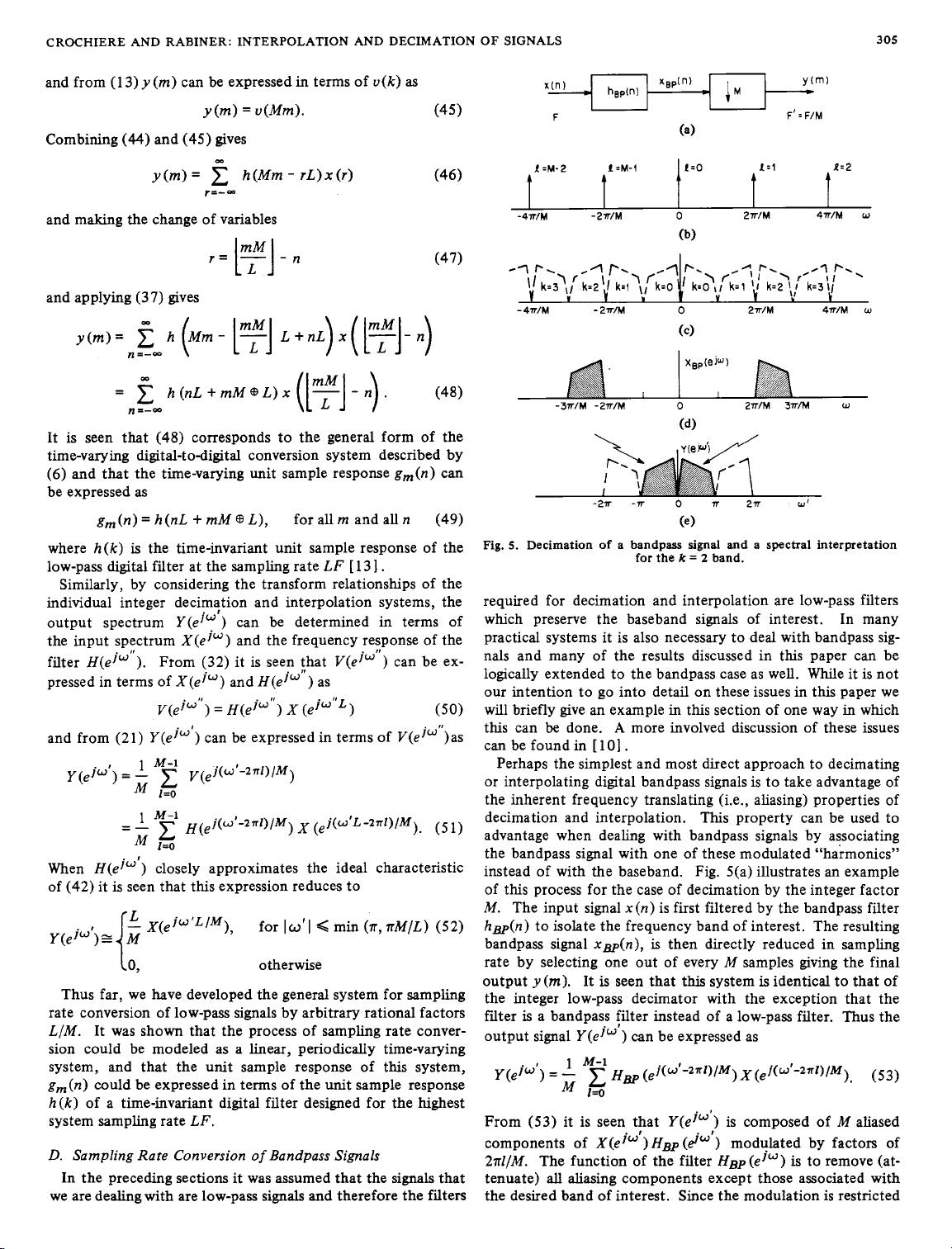
Fig.
5.
Decimation
of
a bandpass
signal
and a spectral interpretation
for
the
k
=
2
band.
required for decimation and interpolation are low-pass filters
which preserve the baseband signals of interest. In many
practical systems it is also necessary to deal with bandpass sig-
nals and many of the results discussed in this paper can be
logically extended to the bandpass case as well. While it is not
our intention to
go
into detail on these issues in this paper we
will briefly give an example in this section
of
one way in which
this can
be
done.
A
more involved discussion of these issues
can be found in [lo].
Perhaps the simplest and most direct approach to decimating
or interpolating digital bandpass signals is to take advantage of
the inherent frequency translating (i.e., aliasing) properties of
decimation and interpolation. This property can be used to
advantage when dealing with bandpass signals by associating
the bandpass signal with one of these modulated cLharmonics'y
instead of with the baseband. Fig. 5(a) illustrates
an
example
of this process for the case of decimation by the integer factor
M.
The input signal
x(n)
is first filtered by the bandpass filter
hgp(n)
to isolate the frequency band of interest. The resulting
bandpass signal
xap(n),
is
then directly reduced in sampling
rate by selecting one out of every
M
samples giving the final
output
y
(m).
It
is
seen that this system
is
identical to that of
the integer low-pass decimator with the exception that the
fiiter
is
a bandpass filter instead
of
a low-pass filter. Thus the
output signal
Y(elW
)
can be expressed as
(53)
From (53) it is seen that
Y(ejW')
is composed
of
M
aliased
components of
X(eJW
)
HBP
(e'"')
modulated by factors of
2nllM.
The function of the filter
H~p(el~)
is
to remove (at-
tenuate)
all
aliasing components except those associated with
the desired band of interest. Since the modulation is restricted
.,
剩余31页未读,继续阅读
点击了解资源详情
点击了解资源详情
106 浏览量
193 浏览量
122 浏览量
117 浏览量
192 浏览量
193 浏览量
2021-02-07 上传

Phirix
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Delphi纯源码QR二维码生成器支持中英文
- 罗克韦尔CENTERLINE 2500智能马达控制中心的特性与功能
- ARIMA模型预测股票价格准确性分析与未来工作展望
- ECharts图表应用与区间查询功能展示
- Java+EE技术面试题解析与源码工具应用
- 探索SVG在WebGIS开发中的应用与源码解析
- JAVA常用算法项目:LeetCode分类刷题指南
- Desech Studio中Angular插件的使用与测试教程
- 51单片机走马灯效果的Proteus仿真教程
- JavaScript塔围攻1第32章核心解析
- 罗克韦尔可视化解决方案选型指南全面解析
- LeetCode刷题指南:按语言分类的编程题库
- Kali Linux环境下WiFi攻击与防护技术分析
- pickadate.js-gh-pages压缩包使用教程
- MV C++ 14.0新版本特性及功能介绍
- Bootstrap网页自定义选项查询字符串插件介绍
