局部特征匹配与识别:对应关系与视觉搜索
需积分: 10 96 浏览量
更新于2024-07-17
收藏 8.81MB PDF 举报
"本次讲座的主题是‘instance-level recognition II’,由Josef Sivic主讲,涉及图像匹配和识别中的局部特征、对应关系、半局部和全局几何关系,以及RANSAC和霍夫变换等核心概念。课程网页链接、作业提交截止日期和MATLAB教程的相关信息也一并给出。"
在图像处理和计算机视觉领域,实例级识别是一个关键问题,它涉及到识别图像中的特定对象,而不仅仅是类别。讲座内容主要分为三个部分:
第一部分:图像匹配和识别与局部特征
局部特征在图像识别中扮演着重要角色,因为它们能够对光照变化、尺度变化和轻微变形保持不变性。这些特征包括SIFT(尺度不变特征转换)、SURF(加速稳健特征)和ORB(Oriented FAST and Rotated BRIEF)等。它们通过检测图像中的关键点并提取描述符来实现。关键点是图像中具有显著特性的位置,描述符则是在这些点周围的像素模式,用于区分不同的关键点。
第二部分:对应关系、匹配和识别
对应关系是指在不同图像或同一图像的不同视图中找到相同的特征点。这通常需要解决的问题是匹配问题,即找到两幅图像间的一对一映射。匹配方法包括基于描述符距离的比对、结构相似性度量等。对应关系对于计算几何任务,如三维重建和物体识别至关重要。例如,通过RANSAC(随机样本一致性)算法可以去除匹配过程中的噪声和误匹配,提高匹配的准确性。
第三部分:半局部和全局几何关系
除了局部特征匹配,还涉及到半局部和全局几何关系的分析。半局部关系考虑了相邻特征之间的相对位置,有助于检测图像间的扭曲和旋转。全局几何关系则关注整个场景的结构,例如平面检测、直线检测和透视关系。这些关系可以用来验证匹配的正确性,进一步提升匹配和识别的可靠性。
接下来的讲座将探讨大规模视觉索引,这是在海量图像数据库中快速搜索和检索特定图像的关键技术,由C.Schmid讲解。
总结来说,这个讲座深入探讨了利用局部特征进行图像匹配、识别以及如何处理几何关系,为理解和实现高级计算机视觉应用奠定了基础。

Approach
Pre-processing (last lecture):
• Detect local features.
• Extract descriptor for each feature.
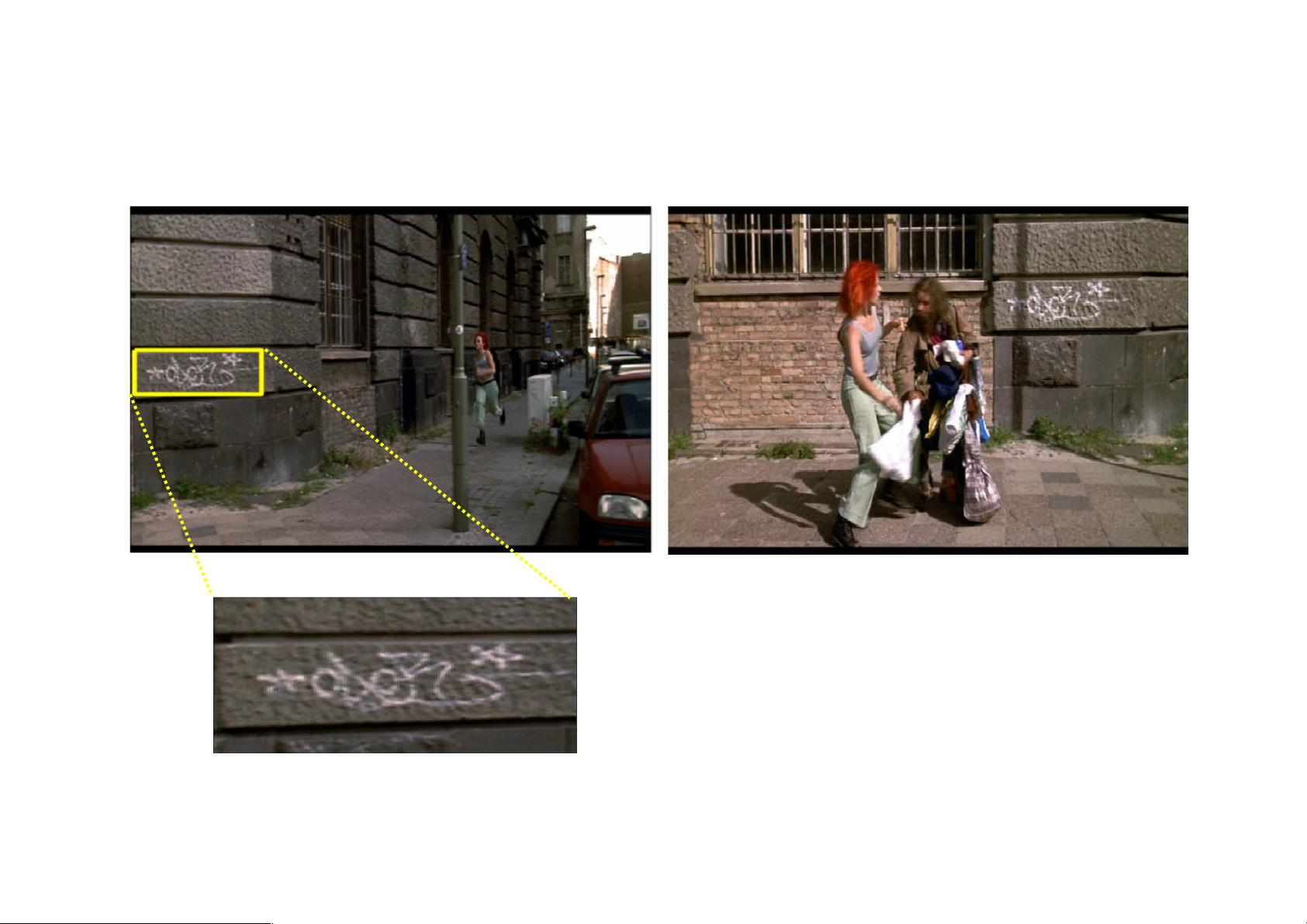
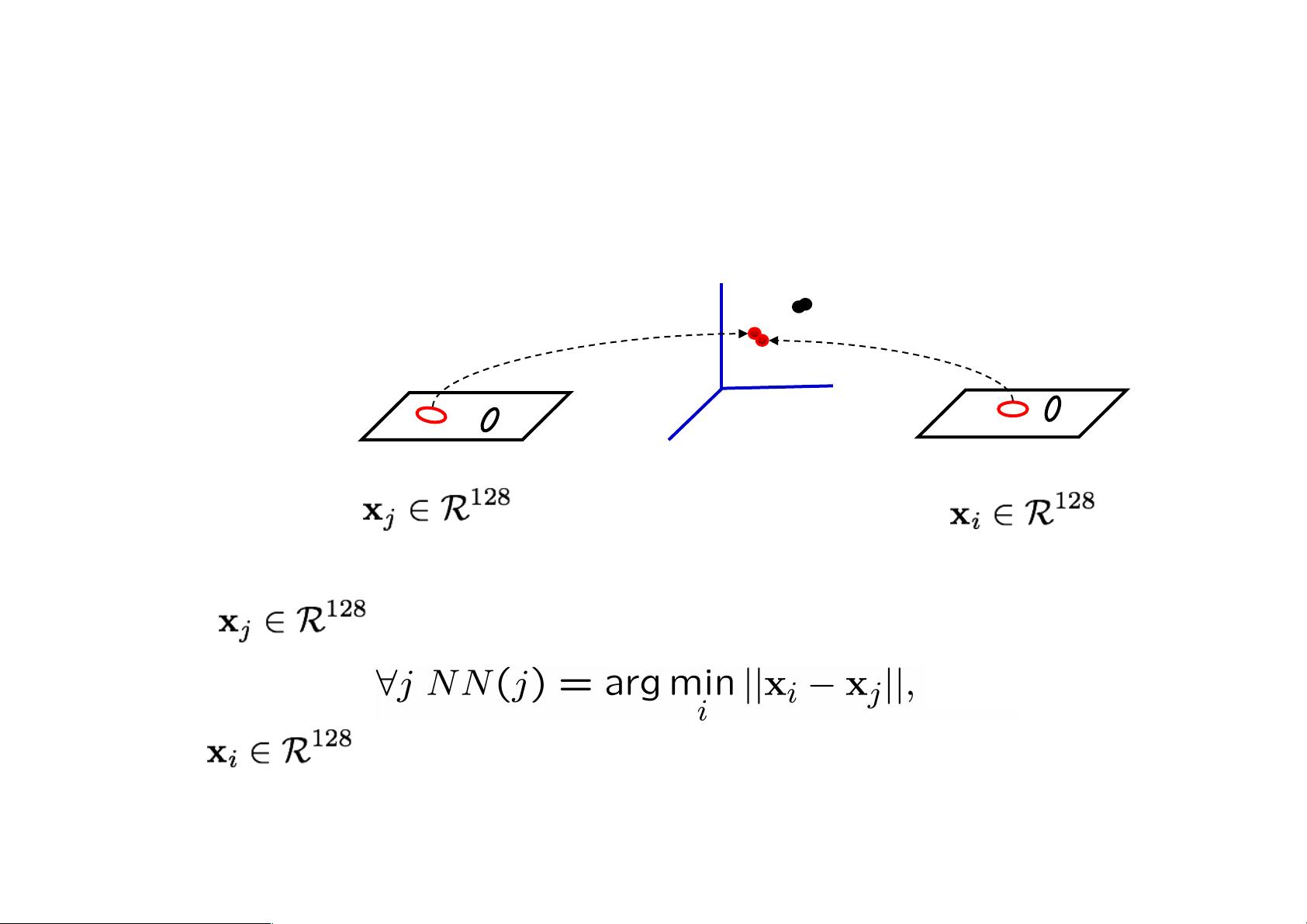
Matching:
1. Establish tentative (putative) correspondences based on
local appearance of individual features (their descriptors).
2. Verify matches based on semi-local / global geometric
relations.
剩余62页未读,继续阅读
2021-06-23 上传
2021-03-13 上传
2023-06-12 上传
2023-02-07 上传
2023-07-25 上传
2023-04-17 上传
2023-07-29 上传
2023-06-06 上传
2023-09-09 上传
2023-07-10 上传

Alpha-猪
- 粉丝: 13
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
