参数估计误差驱动的自适应控制:理论与工业应用深度解析
需积分: 49 51 浏览量
更新于2024-07-16
3
收藏 4.45MB PDF 举报
"基于参数估计误差的自适应控制是一种结合了智能学习、自适应控制理论与优化方法的先进技术,旨在提升机电系统的可靠性和工作效率。研究的核心在于解决非线性系统中存在的参数不确定性问题,这是近三十年来科研领域的热点。传统的自适应控制理论虽成熟,但在实际应用中,如伺服系统、机器人系统、车辆动力传动系统等,遇到的问题包括自适应律可能无法保证参数快速收敛,以及系统瞬态性能难以精确评估。
该研究采用自适应学习方法,针对参数估计误差设计自适应律,通过在线更新系统未知参数的估计值,如使用梯度法或最小二乘法进行参数估计。这种方法不仅适用于连续时间系统,也适用于离散时间系统。通过系统观测器或预测器的设计,以及误差反馈机制,自适应律帮助控制器动态调整参数,以实现对参数不确定性的补偿,从而提高控制系统的稳定性和性能。
应用范围广泛,涉及多个实际场景,如车辆动力系统中的发动机控制、车辆悬架系统,以及可再生能源转化系统,如核聚变装置制冷系统和海浪能转换系统。研究的意义在于,通过系统建模与参数估计,可以克服由物理定律带来的参数不确定性,使得控制设计更为精确,进一步促进人机交互机器人系统等复杂系统的高效运行。
然而,实际应用中仍需解决持续激励条件的验证问题,确保在线控制的有效性和鲁棒性。报告详细阐述了自适应控制理论的应用方法、案例分析以及未来的研究方向和预期成果,强调了在实际工业系统中应用自适应控制技术的挑战与进展,为相关领域的工程师提供了宝贵的理论支持和技术指导。"
KUST-ICES
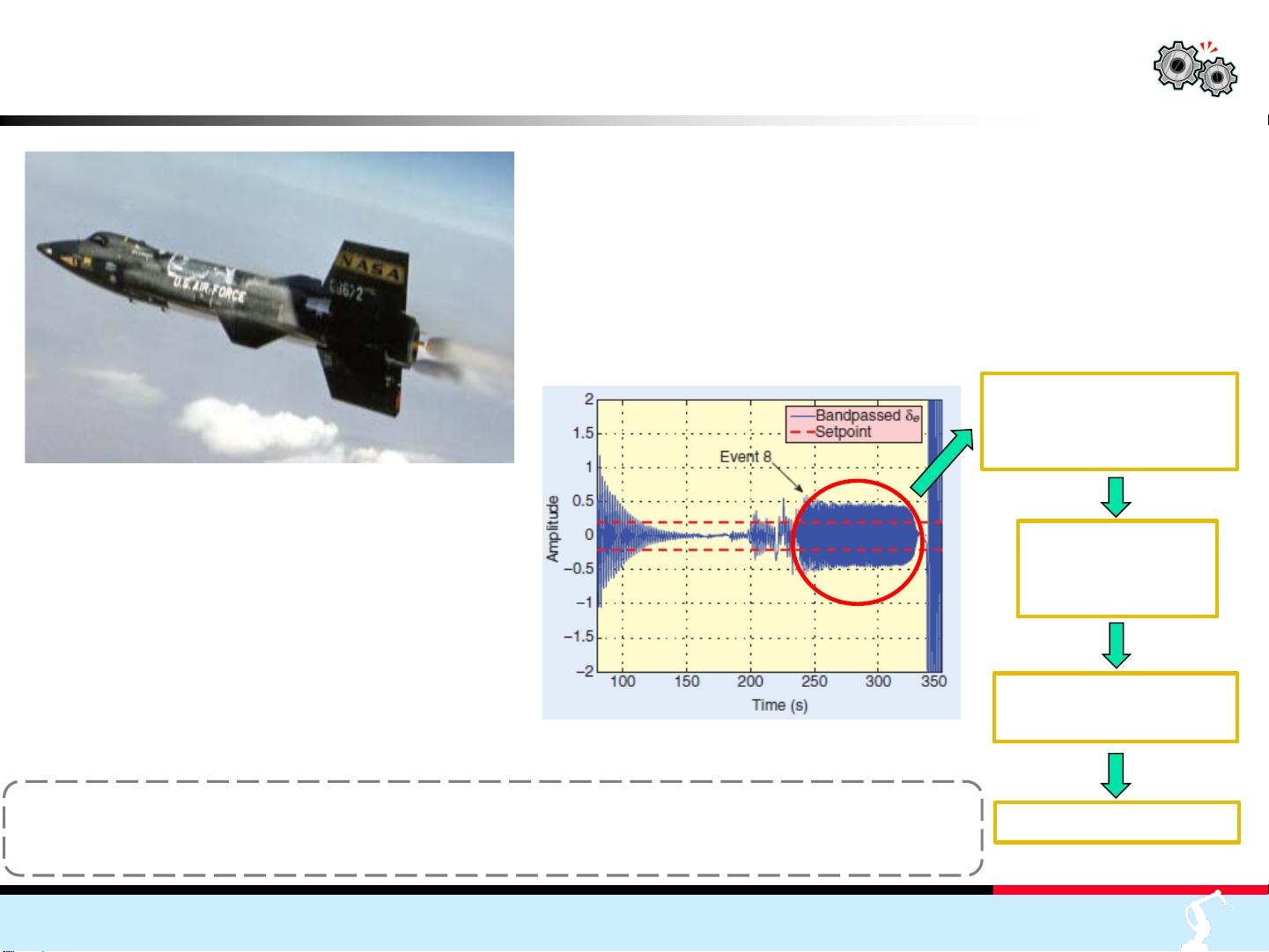
X-15-3飞机失事
USAF X-15, 自适应控制方法早期应用对象
自适应控制器输出幅值
过大的自适应学习速率
激发高频未建模动态导
致过大的控制信号
控制信号大小超
出执行机构最大
饱和范围
执行机构响应频率无
法跟随控制信号
飞行器坠毁
Z. T. Dydek, A. M. Annaswamy, and E. Lavretsky, "Adaptive control and the NASA
X-15-3 flight revisited," IEEE Control Systems, vol. 30, pp. 32-48, 2010.
自适应控制可在线调节系统/控
制器参数,可实现被控系统性能
提升。NASA将自适应控制算法
应用于X-15飞行器上。
1967年11月15日,NASA采用自适应控制算
法的X-15-3型号飞机坠毁
美国学者Annaswammy发表于IEEE Control
System Magazines杂志上的一篇文章揭示了
该型号飞机坠毁的原因
Jing Na-11
剩余57页未读,继续阅读
2021-10-01 上传
2015-08-14 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-06-01 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

处女座程序员的朋友
- 粉丝: 348
- 资源: 104
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全国江河水系图层shp文件包下载
- 点云二值化测试数据集的详细解读
- JDiskCat:跨平台开源磁盘目录工具
- 加密FS模块:实现动态文件加密的Node.js包
- 宠物小精灵记忆配对游戏:强化你的命名记忆
- React入门教程:创建React应用与脚本使用指南
- Linux和Unix文件标记解决方案:贝岭的matlab代码
- Unity射击游戏UI套件:支持C#与多种屏幕布局
- MapboxGL Draw自定义模式:高效切割多边形方法
- C语言课程设计:计算机程序编辑语言的应用与优势
- 吴恩达课程手写实现Python优化器和网络模型
- PFT_2019项目:ft_printf测试器的新版测试规范
- MySQL数据库备份Shell脚本使用指南
- Ohbug扩展实现屏幕录像功能
- Ember CLI 插件:ember-cli-i18n-lazy-lookup 实现高效国际化
- Wireshark网络调试工具:中文支持的网口发包与分析
