车载通信架构演进:从传统总线到CAN总线的革新与优势
需积分: 3 145 浏览量
更新于2024-08-03
收藏 1.43MB DOCX 举报
车载通信架构——传统车内通信网络发展回顾
本文主要探讨了传统车内通信网络的发展历程,特别是从早期的点对点通信模式到后来引入汽车总线技术,如CAN和LIN等,如何提升车辆的通信效率和可靠性。在汽车行业的初期,车内网络的设计着重于保证数据传输的稳定性和安全性,比如CAN(Controller Area Network)标准因其抗干扰能力强,成为了当时主导的通信协议。
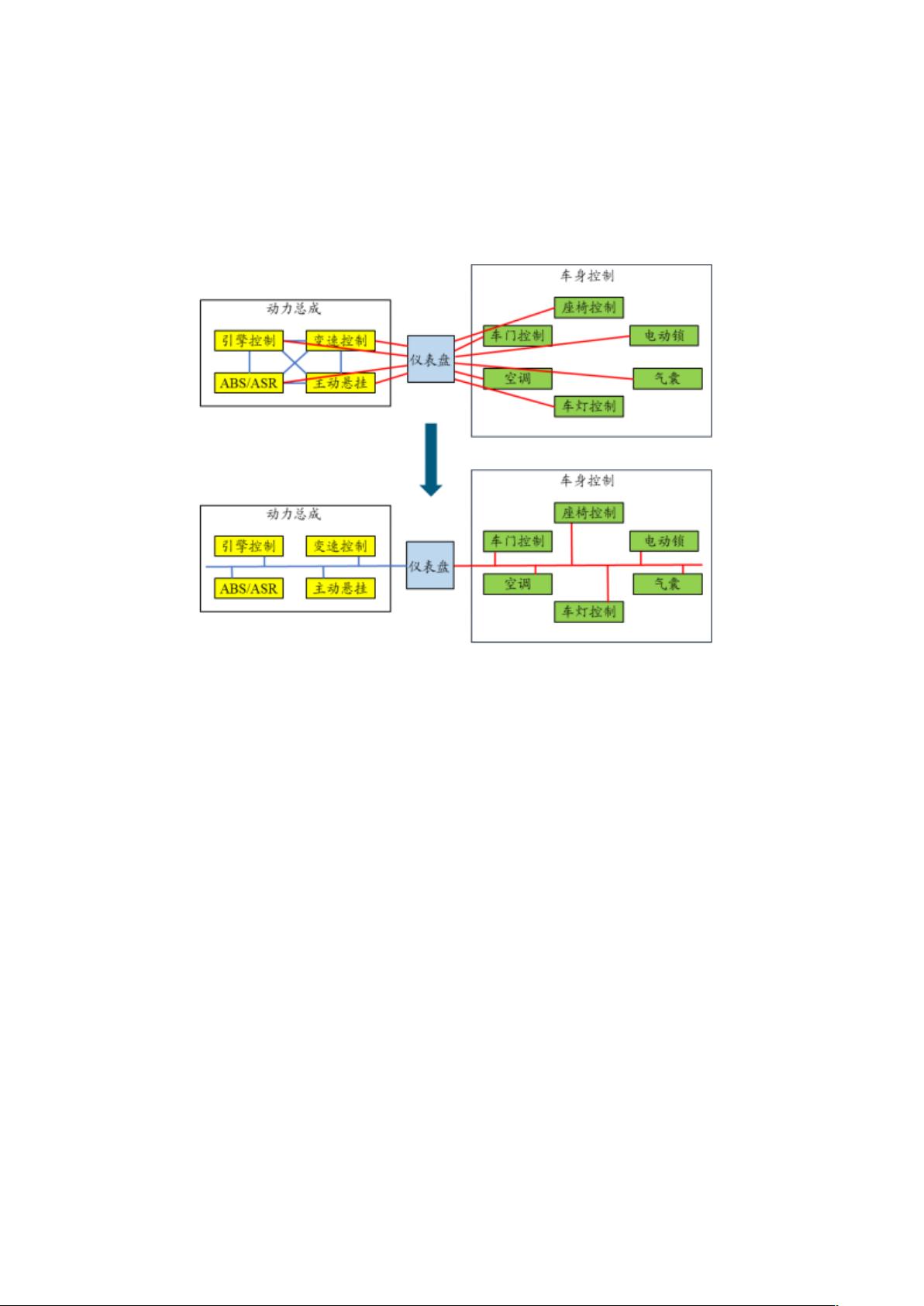
传统的点对点通信模式存在明显的缺点,如线束冗长,节点众多,这不仅增加了成本,而且对车内空间构成挑战。随着汽车功能的日益复杂,特别是智能化和自动化的推进,每个新增功能都需要单独的ECU(电子控制单元),导致系统扩展性差、成本高昂。这种情况下,分布式总线架构如CAN总线的出现解决了这些问题。CAN总线通过将相关功能模块整合在单个ECU中,减少了电线和布线的复杂性,提高了系统的集成度和可维护性。此外,它还支持标准化的协议和数据定义,使得不同供应商生产的控制单元能够无缝接入,降低了设计和维护的成本。
随着汽车总线技术的迭代,如LIN(Local Interconnect Network)的出现,以及后来的FlexRay和MOST(MultiMedia Oriented System Transport)等,车载通信架构朝着更高的带宽、更低的延迟和更强的实时性发展。这些技术的进步不仅提升了汽车的性能,也为未来的自动驾驶和车联网奠定了基础。
然而,尽管总线技术已经显著优化了车内通信,但汽车行业的快速变化意味着固化的供应链和运作模式需要不断适应新的需求。随着5G和V2X(Vehicle-to-Everything)通信的兴起,车载通信网络将进一步融合无线技术和云端服务,以实现更智能、更安全的出行体验。
总结来说,车载通信架构的演变见证了汽车技术从简单到复杂的转变,从点对点的繁琐到总线技术的集成与标准化,这不仅反映了汽车行业对于效率、可靠性和连接性的追求,也是推动汽车智能化和未来出行的重要基石。
-> 2、损坏替换很方便;
-> 3、应用层协议和数据定义统一,任何遵循协议的供应商所生产的控制单元
都可轻易添加或拆除,几乎不需要硬件和软件的修改适配,灵活性强, 设计
成本低。
image
点对点通信到 CAN 总线通信
汽车总线技术发展历史早,迭代周期长,固化传统供应链及运作模式难以适应
更快的开发需求。 早在 1986 年博世便提出 CAN 总线技术,至今其仍是应用最
广的汽车总线技术,并且在进行更新迭代。2015 年,传输速率 5Mbps 的 CAN-
FD 国际 ISO 标准推出,2021 年 CiA( CAN in Automation)发布 CiA 610-1 规
范(第三代),传输速度可达 10Mbps 的 CAN XL 面世,但尚未正式通过 ISO 标
准。LIN 总线、 FlexRay 总线和 MOST 总线的最初标准分别于 1999 年、2005
年、 2006 年相继提出,相关公司或联盟的建立均在 2000 年之前。对于彼时
的汽车而言,这些总线技术已基本能满足车内通信需求,因此一直沿用至今,
技术进步和迭代速度并不快,直到最近在智能网联汽车对车内通信需求大幅提
升的冲击下,CAN 总线的迭代速度才有所加快。
剩余10页未读,继续阅读
196 浏览量
114 浏览量
2023-12-16 上传
117 浏览量
400 浏览量
237 浏览量
103 浏览量
733 浏览量
282 浏览量

车载诊断技术
- 粉丝: 8428
 我的内容管理
展开
我的内容管理
展开







最新资源
- Delphi实现在线升级功能的解决方案
- 系统映像回调枚举工具:Win7至Win10兼容
- Java并行编程S6课程详解
- 最优化方法试题解析与计算技巧
- 超强AFN封装:优化iOS网络请求流程
- Highcharts插件实现自动轮换数据统计图
- QHSUSB驱动程序(x64)下载与安装指南
- 掌握Redux核心原理,深入浅出JavaScript框架
- brew-server: 探索JavaScript驱动的服务器技术
- SDK2000视频卡安装指南:双卡设置与驱动教程
- 微信小程序源码:健康菜谱查找与检索应用
- 易语言开发的业务销售记录系统源码及成品发布
- MATLAB微分方程模型源码深度解析
- SegueCTT - 实时跟踪CTT快递单的Chrome扩展程序
- Android Studio直接创建并运行Java工程方法
- MySQL Connector/Net5:兼容旧版数据库的连接器解决方案
