基于DSP的高效草莓采摘机器人关节控制器设计
70 浏览量
更新于2024-09-05
1
收藏 445KB PDF 举报
本文档深入探讨了"基于DSP的草莓采摘机器人关节控制器的研究"这一主题,由作者戴刘江、张铁中和杨丽合作完成,发表在中国农业大学农业工程系。研究的核心是以永磁同步电机(PMSM)作为执行电机,采用三闭环位置伺服控制方案,实现了直轴电枢电流为零的矢量控制策略,并且将DSP作为处理器,构建了一款高效且经济的运动控制器。
该控制器设计的关键在于,它结合了精确的矢量控制技术,确保了机器人的高精度定位,能够在±1.0mm的范围内达到稳定的运动控制。此外,通过ACPM750E电机功率驱动模块,对电机进行了相应的控制程序设计,使得机器人在面对草莓采摘中的复杂环境,如大范围移动、避免对草莓的损伤以及枝叶障碍等问题时,能够展现出优秀的性能。
摘录部分介绍了草莓采摘机器人的整体结构,包括机构本体、视觉信号采集与处理系统、控制系统以及人机交互界面。控制系统的核心是闭环控制系统,其中PC机作为上位机,接收图像处理系统的坐标信息,通过逆运动学算法计算出机器人运动路径,然后传递给控制器驱动关节运动,实现草莓的精准采摘。
研究者针对当前工业级运动控制系统存在的体积大、价格高的问题,提出了适用于草莓采摘机器人的低成本、小型化解决方案,这不仅降低了机器人的购置成本,还提高了其在农业生产场景中的实用性和适应性。整个设计旨在提升草莓采摘机器人的工作效率和用户体验,为草莓种植户提供一个性价比高的自动化工具。
这篇论文为草莓采摘机器人领域的运动控制技术提供了一个创新的解决方案,展示了如何通过集成DSP和先进的控制策略,实现农业机器人在特定环境下的高效、精准操作,对于推动农业自动化的发展具有重要的实际意义。
http://www.paper.edu.cn
基于 DSP 的草莓采摘机器人关节控制器的研究
戴刘江,张铁中,杨丽
中国农业大学农业工程系,北京(100083)
E-mail: dlj831220@163.com
摘要:本课题以永磁同步电机为执行电机,采用三闭环位置伺服控制方案,直轴电枢电流为
0的矢量控制策略,制作了以 DSP 为处理器的运动控制器;采用 ACPM750E 为电机功率驱动
模块,进行相应控制程序的设计。实验结果表明基于 DSP 的草莓采摘机器人关节控制器的位
置误差在±1.0mm 内,运行稳定可靠。
关键词: 运动控制器,矢量控制,PMSM,DSP
中图分类号:TM35
1 引 言
目前,草莓采摘机器人的研究在国内外受到广泛重视
[1-2]
。采摘机器人控制系统是机器
人的核心,决定机器人的性能和作业效果。草莓采摘机器人与工业机器人的作业环境相比具
有以下特点
[2-3]
:作业范围大,需要在田间或温室内移动;草莓鲜嫩,易受损伤,生长位置
具有不确定性;采摘时常遇到枝叶障碍等。草莓采摘机器人的购买对象为农户,这就要求机
器人的价格合理。因此,草莓采摘机器人需要采用控制精度高,响应速度快,占用空间小,
价格低的运动控制器。目前广泛用于工业场合的运动控制系统体积大且价格昂贵,不适合于
采摘机器人。本课题旨在研究控制精度高,响应速度快,占用空间小,价格低适合于采摘机
器人的运动控制器。
2 草莓采摘机器人关节控制器的方案选择
本研究采用了本实验室已有的采摘机器人平台
[4]
。采摘机器人主要由机构本体、视频信
号采集与处理系统、控制系统和人机界面组成。工作时,机器人视觉系统通过摄像机采集目
标草莓的位置信号,经图像处理获得所要采摘草莓的空间三维坐标信息,并将此坐标输入上
位机;上位机根据机器人正、逆运动学计算出机器人的最佳运动轨迹;再把运动轨迹信号送
给控制器,驱动各个关
节有序运动,使末端执
行器运动到所要采摘的
草莓的位置,实现草莓
的采摘。
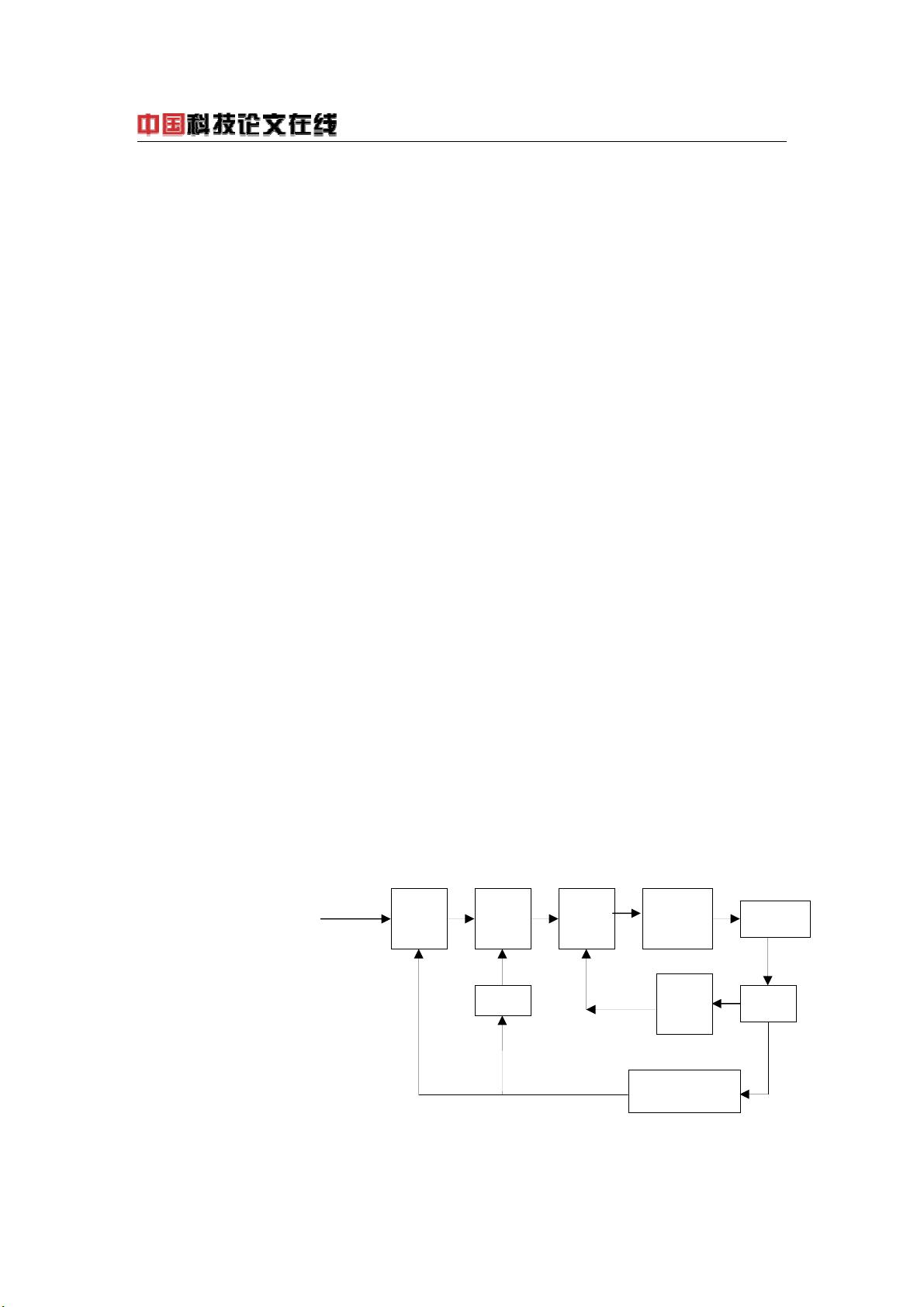
给定位置
位置
调节
速度
调节
电流
调节
Park
逆变换
逆变器
电机
电流
检测
电流环
转子位置检测
位置环
微分
速度环
图 1 闭环控制系统控制框图
Fig.1 Structure of closed loop controlling system
本课题所研究的控
制系统利用 PC 机作为
上位机,根据给定末端
执行器相对于基坐标系
的位姿,规划出运动过
1
下载后可阅读完整内容,剩余4页未读,立即下载
2021-08-14 上传
2023-07-13 上传
197 浏览量
231 浏览量
112 浏览量
221 浏览量
323 浏览量
155 浏览量

weixin_38518722
- 粉丝: 7
- 资源: 845
 我的内容管理
展开
我的内容管理
展开







