组合柔性机械臂振动抑制性能研究
版权申诉
146 浏览量
更新于2024-06-14
收藏 12.57MB PDF 举报
"该资源是一篇关于组合柔性机械臂抑振性能研究的硕士论文,主要探讨了如何通过设计组合结构的柔性机械臂来减少振动,提高运动控制的精度。论文中设计并测试了三种不同截面形式的组合柔性臂,通过有限元分析和实物试验比较了静态和动态性能。此外,还研究了各种参数如夹紧力、减振层厚度、摩擦系数对性能的影响,并验证了组合柔性臂在弯扭复合振动中的抑制效果。关键词包括柔性机械臂、组合结构、抑振和有限元分析。"
本文深入研究了组合柔性机械臂在抑制振动性能方面的潜力,首先定义了柔性机械臂的概念,即长径比较大的机械臂,这类机械臂由于自身的柔韧性,在运动控制中面临更大的挑战。为了解决这个问题,研究者提出了采用组合结构的柔性臂,利用结构间的滑移、摩擦和挤压来消耗振动能量,从而实现振动抑制。
作者设计并构建了三种具有不同截面形状的组合柔性臂,建立了振动检测系统,对这些机械臂的末端振动进行位移、速度和加速度等关键参数的检测与分析。通过有限元方法和实物试验的结合,论文验证了有限元法在组合柔性臂静力学分析中的适用性。通过弯曲变形试验,研究了力-变形曲线,引入能量耗散率作为评价组合柔性臂静力学性能的指标,并探讨了夹紧力、减振层厚度和摩擦系数等因素对性能的影响。
论文进一步对比了组合柔性臂和实体柔性臂的振动响应,证明了组合结构在振动抑制方面的优势。通过实验分析,验证了有限元方法在动力学分析中的准确性和实用性。同时,提出了能量耗散率、振动衰减率和阻尼系数作为评估组合柔性臂抑制性能的量化指标,分析了这些参数如何影响其抑振性能。通过波纹管组合柔性臂的弯扭复合振动试验,展示了组合柔性臂在复杂振动情况下的抑制性能。
最后,论文详细分析了三种不同截面形式的组合柔性臂之间的差异和联系,为未来的设计优化提供了理论基础和实践指导。这篇硕士论文对于理解和改进柔性机械臂的振动控制技术具有重要的理论价值和工程应用意义。
硕士论文
组合柔性机械臂抑振性能研究
2.2波纹管组合柔性臂试验装置设计
}.酬IN
l
c】l力
回 q5P
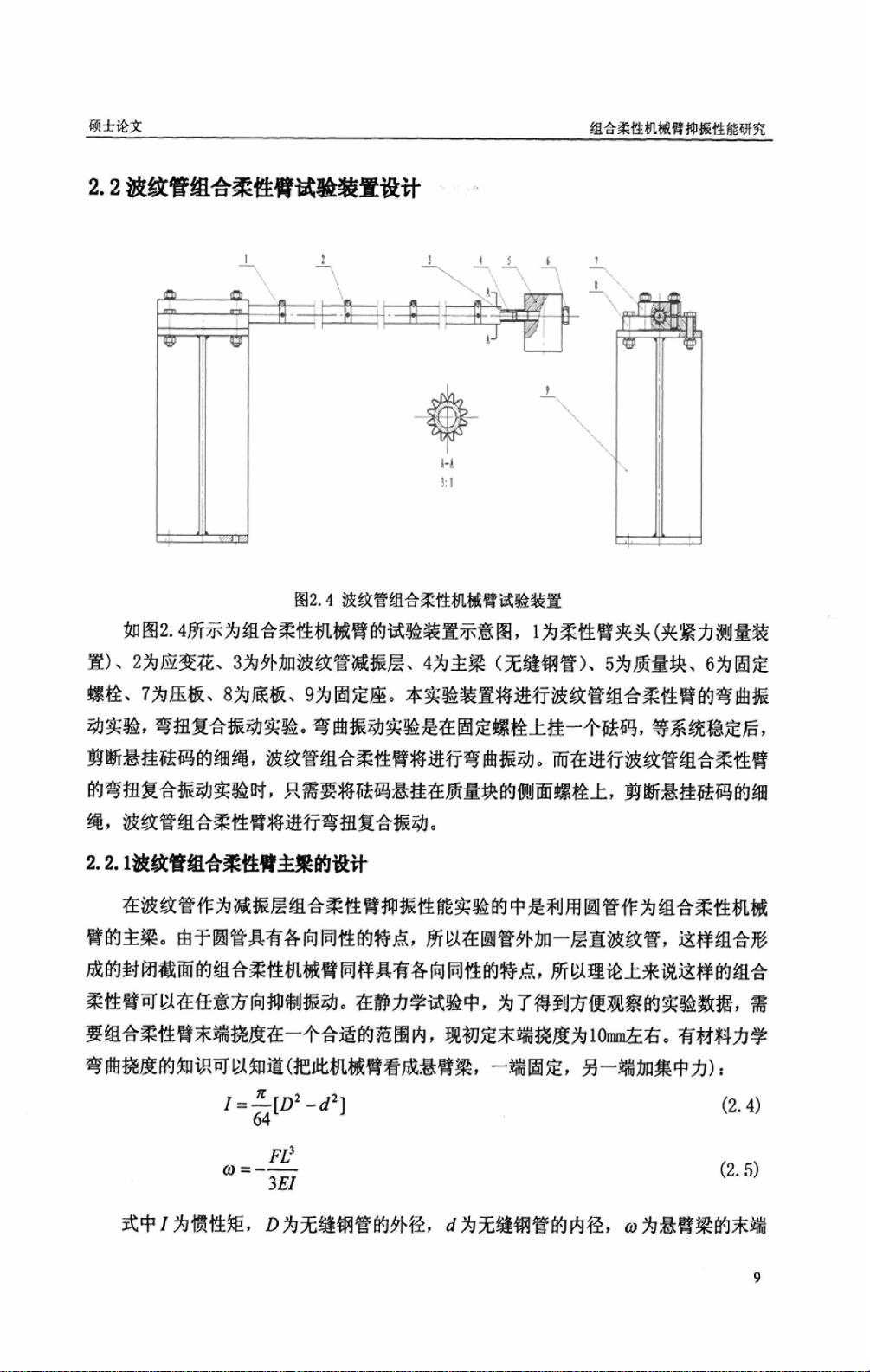
图2.4波纹管组合柔性机械臂试验装置
如图2.4所示为组合柔性机械臂的试验装置示意图,l为柔性臂夹头(夹紧力测量装
置)、2为应变花、3为外加波纹管减振层、4为主梁(无缝钢管)、5为质量块、6为固定
螺栓、7为压板、8为底板、9为固定座。本实验装置将进行波纹管组合柔性臂的弯曲振
动实验,弯扭复合振动实验。弯曲振动实验是在固定螺栓上挂一个砝码,等系统稳定后,
剪断悬挂砝码的细绳,波纹管组合柔性臂将进行弯曲振动。而在进行波纹管组合柔性臂
的弯扭复合振动实验时,只需要将砝码悬挂在质量块的侧面螺栓上,剪断悬挂砝码的细
绳,波纹管组合柔性臂将进行弯扭复合振动。
2.2.1波纹管组合柔性臂主粱的设计
在波纹管作为减振层组合柔性臂抑振性能实验的中是利用圆管作为组合柔性机械
臂的主梁。由于圆管具有各向同性的特点,所以在圆管外加一层直波纹管,这样组合形
成的封闭截面的组合柔性机械臂同样具有各向同性的特点,所以理论上来说这样的组合
柔性臂可以在任意方向抑制振动。在静力学试验中,为了得到方便观察的实验数据,需
要组合柔性臂末端挠度在一个合适的范围内,现初定末端挠度为10衄左右。有材料力学
弯曲挠度的知识可以知道(把此机械臂看成悬臂梁,一端固定,另一端加集中力):
,=兰fD2一d21
(2.4)
64’
。
CO:一黑
(2.5)
=一一
LZ.0,
3EI
式中,为惯性矩,D为无缝钢管的外径,d为无缝钢管的内径,CO为悬臂梁的末端
剩余63页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-06-27 上传
2019-08-07 上传
2021-09-25 上传
2021-09-21 上传
2021-09-26 上传

ohmygodvv
- 粉丝: 507
- 资源: 4811
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
