NI Vision Builder AI中的RS232串口控制拍照流程
需积分: 32 32 浏览量
更新于2024-09-09
收藏 681KB DOCX 举报
在National Instruments (NI) Vision Builder AI中,利用RS232通信技术进行精确控制是常见的应用之一。本文将详细介绍如何在该软件中设置和实施一个基于RS232的触发式拍照流程。首先,程序在启动时会保持监听模式,等待来自外部设备的RS232命令。一旦接收到特定命令,例如"Red",其ASCII表示三个字节('R', 'e', 'd'),程序便会执行一次拍照任务。
操作步骤如下:
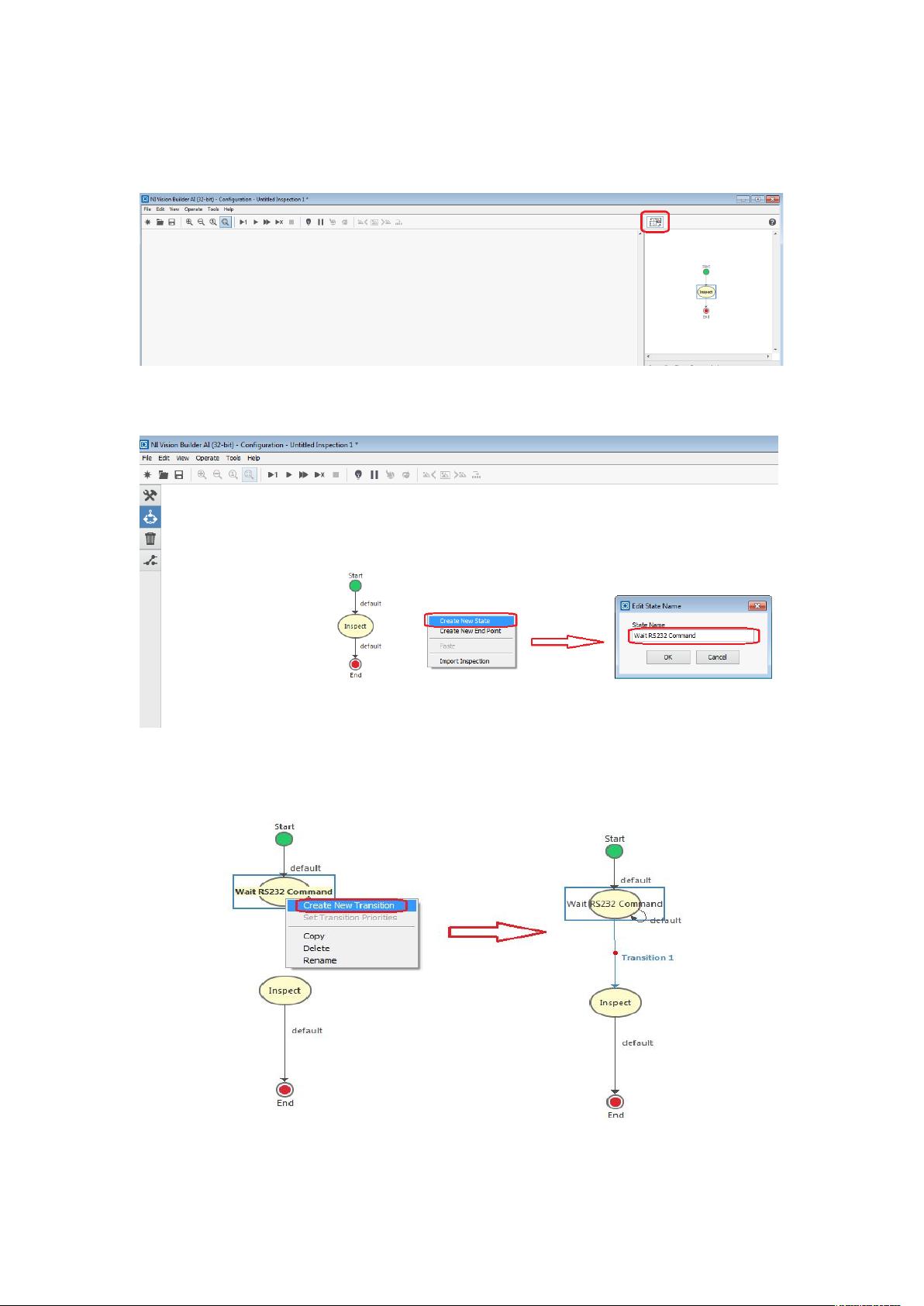
1. **启动并切换到状态图编辑窗口**:通过点击“ToggleMainWindowView”按钮,进入状态图设计界面,便于管理流程逻辑。
2. **创建新的状态**:在空白区域右键选择“CreateNewState”,为新状态命名,如“CommandReception”。
3. **建立状态转移**:右键选择“CreateNewTransition”,将新状态与“Inspect”状态相连,形成流程控制结构。
4. **配置RS232通信**:在新状态中,选择“SerialI/O”图标,设置步进名为“WaitforString”。设置端口为正确的COM端口,并配置接收参数为固定字节数(如接收到"Red"时需3个字节)和匹配模式(Stringreceivedbeforetimeoutmatches),确保命令正确无误。
5. **错误处理与超时设置**:勾选“Stepfailsincaseoferrortimeout”,确保在接收到不匹配命令或超时时程序不会出错。
6. **测量设置**:在状态转移上双击,选择“SerialI/O1”的“StepStatus”作为检查条件,只有当接收到命令且状态为PASS时,才会执行下一步操作。
7. **检查项目配置**:进入“Inspect”状态,设置所需的检查项目,确保拍照过程符合预期。
8. **检测流程**:回到检测窗口,点击“StartInspection”开始检测。此时,程序会处于等待命令的状态。
9. **发送命令**:使用串口调试助手或其他串口工具,从另一台计算机发送预先设置的命令,如"Red",程序会执行拍照,然后再次进入等待命令的循环。
通过以上步骤,用户可以有效地在NI Vision Builder AI中集成RS232通信,实现自动化设备间的交互,确保拍照操作的触发基于外部指令。这在工业自动化、机器人控制以及实验数据采集等领域具有广泛的应用价值。
程序说明:在 NI Vision Builder AI 中使用 RS232 进行通讯,开始运行时,等待 RS232 命令,命令
接收成功后,程序才进行一次拍照,处理,然后又进入等待 RS232 命令状态;
1. 点击”Toggle Main Window View”按钮切换到状态图编辑窗口;
2. 新建一个状态:右击窗口空白区域,选择 Create New Sate,在 Sate Name 中输入新建状态的
名字;
3. 新建一个状态转移:右击上一步新建的状态,选择 Create New Transi#on,把箭头拉到
Inspect 状态上;
下载后可阅读完整内容,剩余5页未读,立即下载
2015-08-20 上传
2024-07-29 上传
点击了解资源详情
点击了解资源详情
2023-03-16 上传
2023-04-30 上传

bluewind1
- 粉丝: 5
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
