"WLKATA Mirobot G代码指令集V1.001详解与机械臂参数设置"
需积分: 0 98 浏览量
更新于2023-12-27
收藏 1.4MB PDF 举报
WLKATA Mirobot G代码指令集用户手册V1.0011
G代码指令集用户手册 | 技术开发文档 V1.001 - 版权所有© 勤牛创智科技有限公司 2021。保留一切权利。 在法律允许的最大范围内,本手册所描述的产品(含其硬件、软件、固件等)均“按照现状”提供,可能存在瑕疵、错误或故障,勤牛创智不提供任何形式的明示或默示保证,亦不对使用本手册或使用本公司产品导致的任何特殊、偶然或间接的损害进行赔偿。本产品的使用者有责任确保遵循相关国家的切实可行的法律法规,确保在勤牛创智机械臂的使用中不存在任何重大危险。
在使用本产品前详细阅读本使用手册及网上发布的相关技术文档并了解相关信息,确保在充分了解产品相关知识的前提下使用本产品。
版本修订记录:
时间 版本号 修订记录
2021/05/30 V1.001 初稿(20210516 固件)
机械臂参数设置:
G代码指令集是一种用于控制机械臂运动的指令集。通过发送G代码指令,用户可以实现机械臂的各种运动,包括直线运动、圆弧运动、旋转运动等。本手册介绍了WLKATA Mirobot机械臂的G代码指令集,以及机械臂的参数设置方法。用户可以根据本手册的内容,编写自己的G代码程序,实现对机械臂的精确控制。
G代码指令集:
G代码指令集包括一系列以字母“G”开头的指令,用于控制机械臂的运动。每条指令包括一个字母和一个数字,代表了不同的运动模式和参数。例如,G00指令表示快速直线移动,G01指令表示线性插补运动,G02和G03指令表示圆弧插补运动。除了G代码指令外,还包括了一些辅助指令,如M代码指令用于控制机械臂的附加功能,如启动/停止机械臂、设置工具偏移等。
机械臂参数设置:
机械臂参数设置是指通过设置机械臂的运动参数,来调整机械臂的运动轨迹、速度、加速度等。机械臂的参数设置对于机械臂的运动精度和稳定性具有重要影响,合理的参数设置可以提高机械臂的运动性能。本手册介绍了WLKATA Mirobot机械臂的参数设置方法,用户可以根据自己的需要,对机械臂的参数进行调整。
总结:
本手册介绍了WLKATA Mirobot机械臂的G代码指令集和参数设置方法。通过本手册的学习,用户可以了解机械臂的基本运动原理和控制方法,掌握G代码编程的技巧,实现对机械臂的精确控制。希望本手册能够对用户在使用WLKATA Mirobot机械臂时有所帮助,也希望用户在使用机械臂时能够遵守相关的安全规定,确保安全使用。
G 代码指令集用户手册 | 技术开发文档 V1.001
- 4 -
1. 指令说明
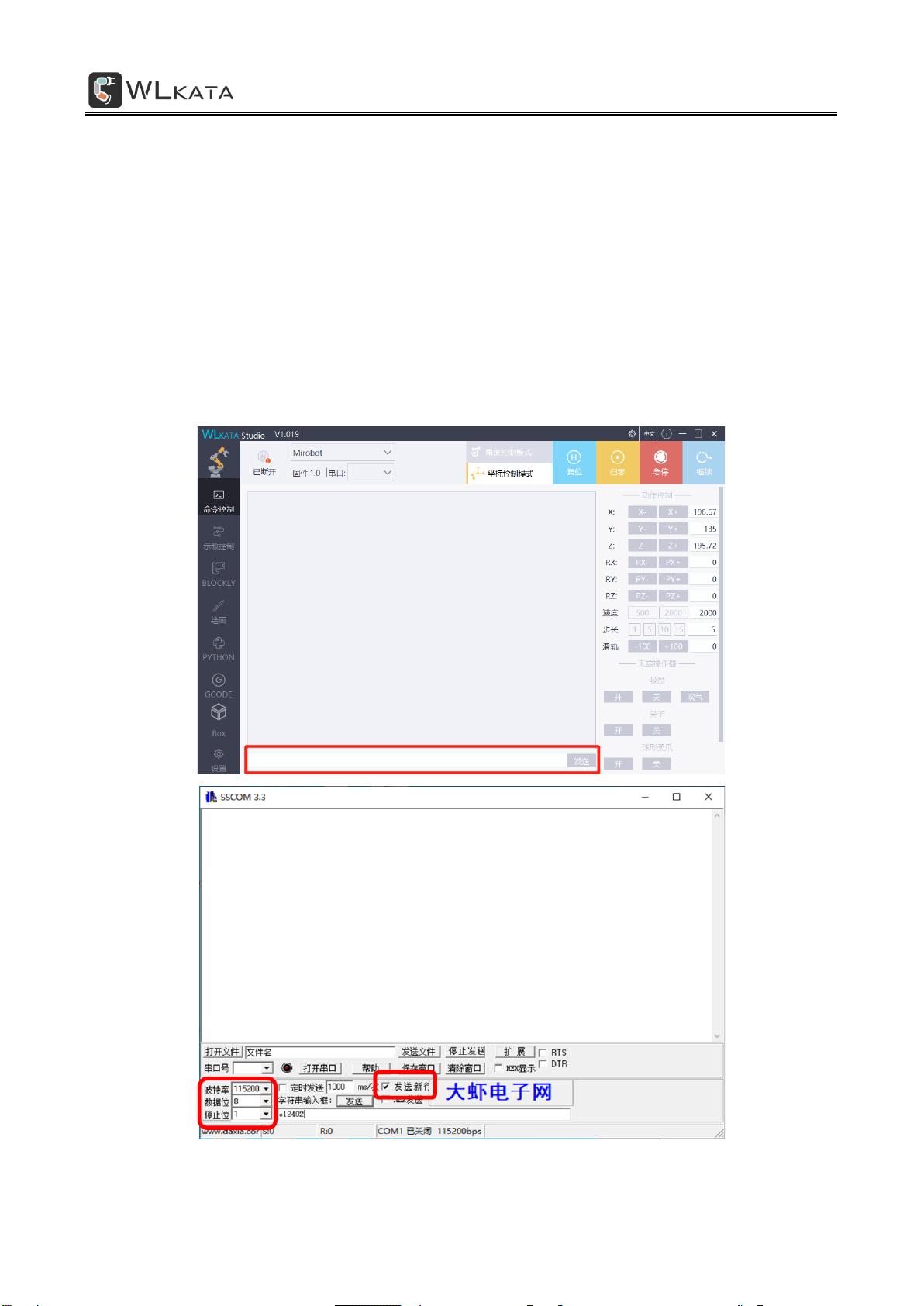
1、 Mirobot 采用 USB 串口方式进行通信。波特率为 115200,数据位 8,停止位 1。
2、 Mirobot 采用基于 G 代码的指令控制。
3、 指令中各个字母不区分大小写。
4、 Mirobot 能够对外输出两组 PWM 信号用于控制末端夹手或者吸盘。
5、 用户可通过 WlkataStudio 或串口工具向机械臂发送指令,每条指令以'\n'换行符为结束
剩余22页未读,继续阅读
2010-01-27 上传
2022-08-04 上传
2022-08-04 上传
438 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

叫我叔叔就行
- 粉丝: 33
- 资源: 323
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
