混合触发下的网络非线性TS模糊系统观测器弹性控制研究
160 浏览量
更新于2024-08-28
收藏 689KB PDF 举报
本文探讨了混合触发策略下的网络非线性T-S模糊系统的基于观测器的弹性控制方法。研究焦点在于设计一种能够在有限带宽网络环境中高效利用资源的控制器,同时处理参数不精确实施和模型匹配问题。作者团队,由Jinliang Liu、Lijuan Zha和Xiangpeng Xie共同贡献,引入了一种创新的混合触发机制,它在状态观测器与控制器之间切换,结合了周期采样与事件触发策略。
首先,系统模型基于T-S模糊理论,这是一种将模糊逻辑与状态空间系统相结合的方法,能够处理复杂的非线性行为。网络化环境增加了挑战,因为数据通信可能会受到时延、噪声和数据包丢失的影响。通过采用混合触发,系统能够智能地决定何时进行周期性更新以保持稳定性,何时在检测到变化时响应,从而降低不必要的通信开销。
为了确保控制器的鲁棒性,研究者设计了一种带有不匹配 membership functions 的观测器。Membership functions 影响模糊系统的决策过程,不匹配可能导致控制器性能下降。通过Lyapunov理论,研究人员建立了确保混合触发 T-S模糊系统稳定性的充分条件,这是一种广泛用于分析动态系统稳定性的数学工具。线性矩阵不等式(LMI)技术在此发挥了关键作用,它是一种有效的求解优化问题和稳定性分析的数值方法。
文中还提出了一个新颖的混合触发 T-S模糊模型,该模型考虑了实际应用中的参数不确定性。通过这个模型,研究者旨在设计一个既能适应系统动态又能抵抗外部干扰的控制器,提高整个系统的可靠性。最后,通过满足建立的条件,作者们成功地设计并证明了观测器基控制器的有效性和稳健性。
总结来说,这篇文章的主要贡献在于提出了一种创新的网络非线性T-S模糊系统控制策略,利用混合触发机制和观测器技术来增强系统的实时性、网络效率和鲁棒性。这对于许多依赖于网络通信的自动化系统,如工业控制、机器人或远程监控,具有重要的实际应用价值。
Resilient observer-based control for networked nonlinear T–S fuzzy systems
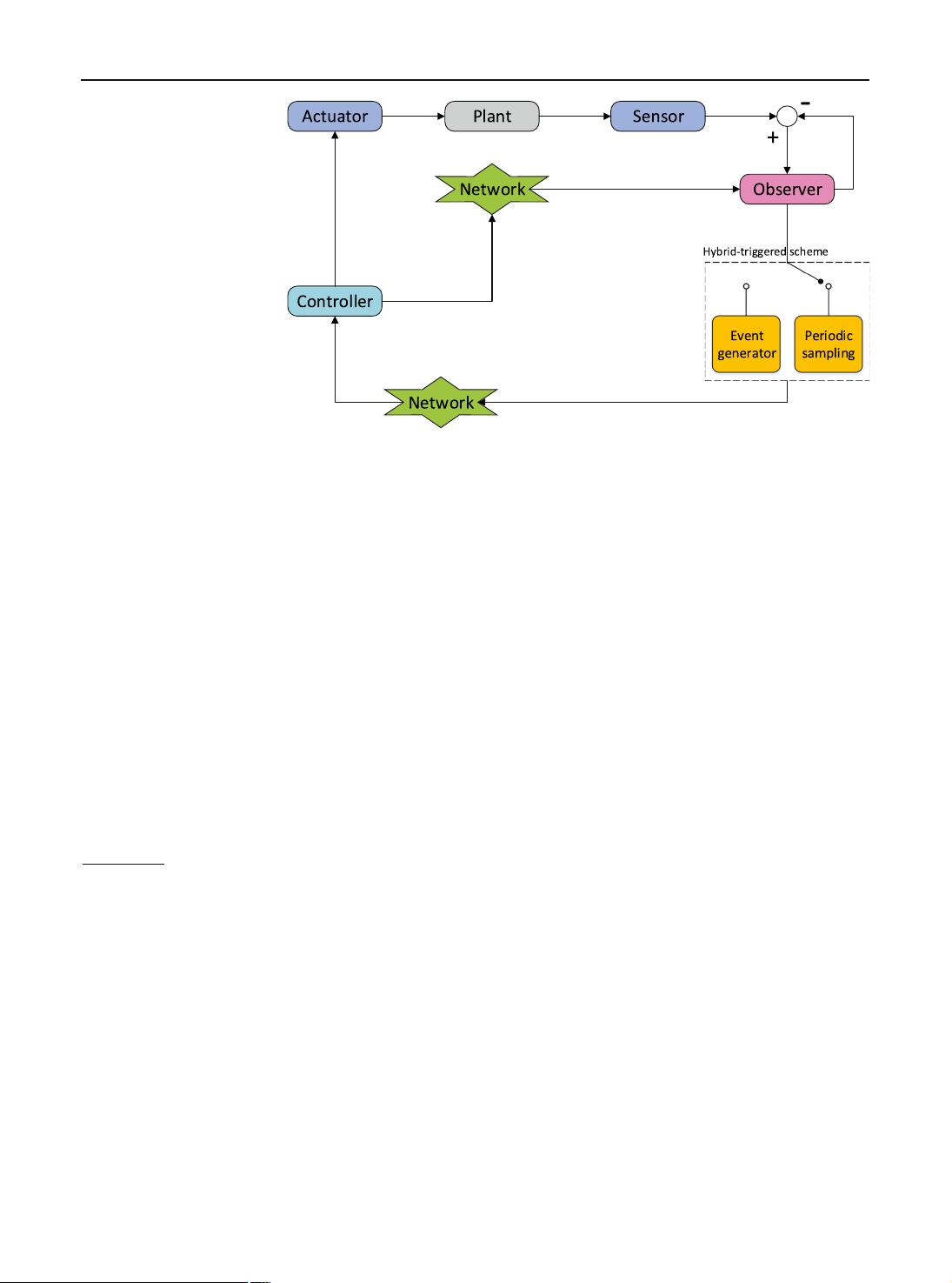
Fig. 1 Block diagram of
the networked T–S fuzzy
system
Then
˙x(t) = A
i
x(t) + B
i
u(t )
y(t ) = C
i
x(t)
(1)
where M
i
q
(i = 1,...,r, q = 1, 2,...,g) is the fuzzy
set, θ
q
(x)(q = 1, 2,...,g) denotes the premise vari-
able, x(t) ∈ R
n
is the state vector, and y(t) ∈ R
m
is the measurable output, u(t) ∈ R
u
is the control
input. A
i
, B
i
and C
i
are known real constant matrices
with appropriate dimensions. By using a center-average
defuzzifier, product fuzzy inference, and a singleton
fuzzifier, system (1) can be inferred as
⎧
⎪
⎪
⎨
⎪
⎪
⎩
˙x(t) =
r
i=1
h
i
(θ(x))[A
i
x(t) + B
i
u(t )]
y(t ) =
r
i=1
h
i
(θ(x))C
i
x(t)
(2)
where θ(x) =
θ
1
(x), θ
2
(x),...,θ
g
(x)
, h
i
(θ(x)) =
μ
i
(θ(x))
r
i=1
μ
i
(θ(x))
and μ
i
(θ(x)) =
g
m=1
M
i
m
(θ
m
(x)),
M
i
m
(θ
m
(x)) is the membership value of θ
m
(x) in
M
i
m
, h
i
(θ(x)) ≥ 0,
r
i=1
h
i
(θ(x)) = 1.
The main objective of this paper is to design
an observer-based controller for the system (2). The
observer model is presented as follows:
Observer Rule j:IFθ
1
(x) is M
j
1
,..., and θ
g
(x) is
M
j
g
Then
˙
ˆx(t) = A
j
ˆx(t) + B
j
u(t )
+(L
j
+ ΔL
j
)(y(t) − C
j
ˆx(t)) (3)
where ˆx(t) is the estimation of the state vector
x(t), L
j
is the observer gain to be designed later.
ΔL
j
= M
1 j
Δ
1
(t)N
1 j
represents the uncertainties in
the observer gain, in which Δ
T
1
(t)Δ
1
(t) ≤ I, M
1 j
and
N
1 j
are the known matrices with appropriate dimen-
sions. The global model of the observer is deduced as
˙
ˆx(t) =
r
j=1
h
j
(θ(x))[A
j
ˆx(t) + B
j
u(t )
+(L
j
+ ΔL
j
)(y(t) − C
j
ˆx(t))] (4)
As shown in Fig. 1, the observer and the con-
troller are connected by a communication network
with resource constraints. A hybrid-triggered scheme
is introduced at the observer side to improve the effi-
ciency of the communication network. Whether the
observer state is transmitted or not will be determined
by a switching strategy between the periodic sampling
and the event-triggered scheme.
For ease of exposition, we make the following
assumptions:
(1) The state of the observer is sampled at a constant
period h. {sh | s ∈ N} represents the set of sampled
instants.
(2) The set of the transmission instants is denoted by
{t
k
h | t
k
∈ N}, which is determined by the sam-
pled state ˆx (t
k
h). ˆx(t
k
h) represents the signal which
arrives at the controller successfully.
(3) τ
t
k
represents the communication delays between
the observer and the controller. τ
t
k
∈[0, ¯τ), ¯τ is
the upper bound of τ
t
k
.
It should be noticed that the premise variables
between the observer and the controller may be asyn-
123
剩余12页未读,继续阅读
2019-05-27 上传
点击了解资源详情
点击了解资源详情

weixin_38519660
- 粉丝: 4
- 资源: 949
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
