"ABB机器人基础知识培训:IRC5控制系统操作与坐标系定义详解"
需积分: 42 96 浏览量
更新于2023-12-15
1
收藏 4.58MB DOCX 举报
ABB机器人资料总结
本文是根据提供的《ABB机器人资料.docx》内容所写的总结。该资料主要介绍了ABB机器人的控制系统IRC5的认识、机器人本体的认识、转数计数器的更新、工具坐标系和工件坐标系的定义、Load data操作步骤、IRC5控制系统的生成以及I/O总线的定义。以下是对每个部分的详细描述:
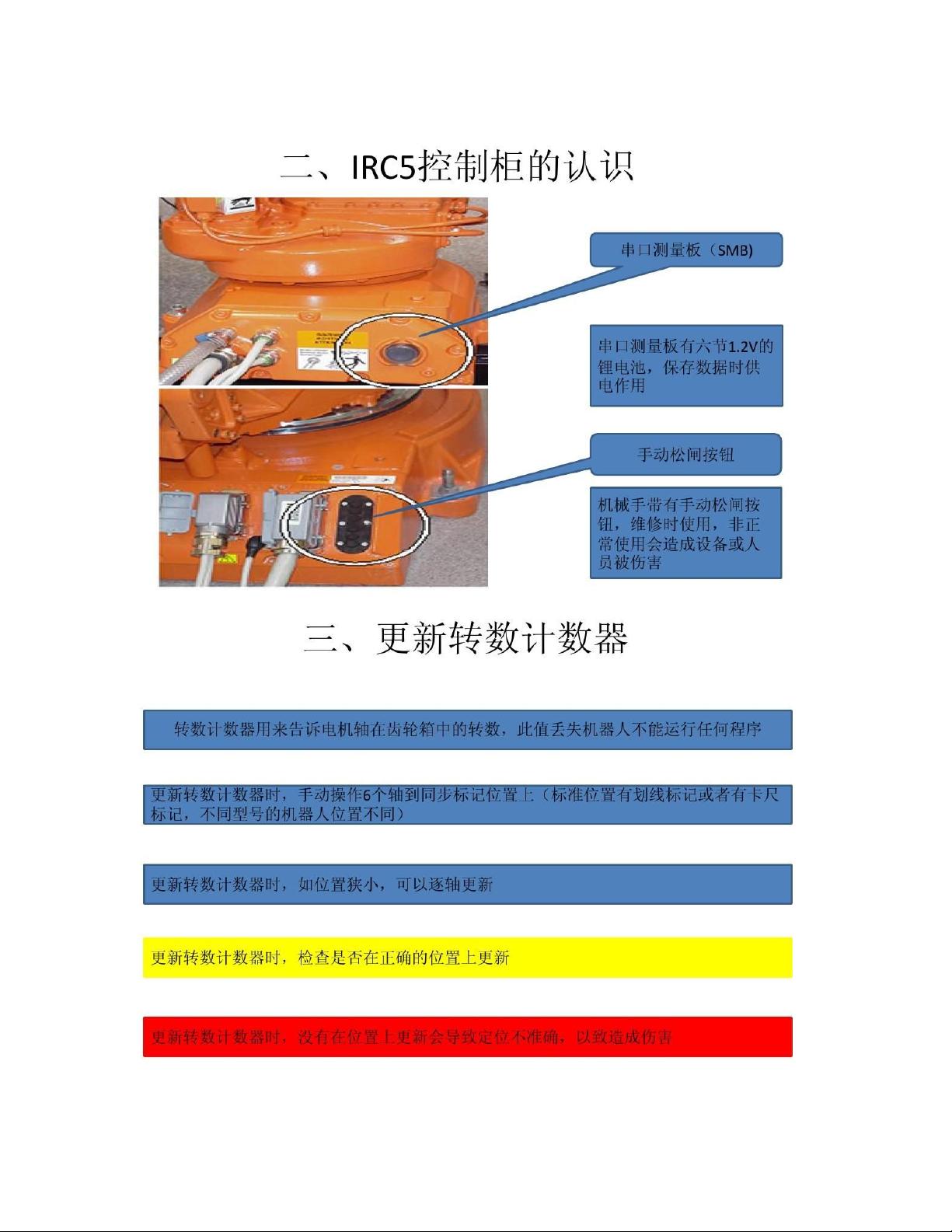
1. IRC5控制柜的认识:
IRC5控制柜是ABB机器人控制系统的主要组成部分。它包含了控制器、电源、通信接口等,用于控制机器人的运动和各种功能。掌握IRC5控制柜的结构和功能对于操作和维护机器人至关重要。
2. 机器人本体的认识:
机器人本体指的是ABB机器人的机械构造,包括机械臂、关节、末端执行器等。了解机器人本体的结构和特点可以帮助我们更好地理解机器人的运动和使用方法。
3. 转数计数器的更新:
转数计数器用于记录机器人的运动次数,通过更新计数器可以清零或者重新设置计数。了解如何更新转数计数器可以帮助我们监控机器人的使用情况和维护需求。
4. 定义工具坐标系:
工具坐标系是用来描述机器人末端执行器相对于机器人本体的位置和姿态的一种坐标系。定义工具坐标系是为了方便机器人执行特定任务,如定位、抓取或加工等。
5. 定义工件坐标系:
工件坐标系是用来描述工件相对于机器人本体的位置和姿态的一种坐标系。定义工件坐标系是为了将工件的位置和姿态与机器人本体的坐标系对应起来,从而实现与工件的精确交互。
6. Load data操作步骤:
Load data是在IRC5控制系统中进行的一种操作,用于加载和保存机器人的参数和程序等信息。学会如何进行Load data操作可以帮助我们有效地管理和调整机器人的配置和运行。
7. IRC5控制系统生成:
IRC5控制系统的生成是指按照我们所需的配置和参数生成具体的控制系统。掌握IRC5控制系统生成的方法可以帮助我们根据实际需求调整和优化控制系统的配置。
8. 定义I/O总线:
I/O总线是指用于连接机器人与外部设备进行数据交换的接口。通过定义I/O总线,我们可以实现机器人与其他设备的实时通信和控制。
以上是我对提供的《ABB机器人资料.docx》内容的总结。通过学习和掌握这些知识,我们可以更好地理解和应用ABB机器人,提高工作效率和质量。希望这些总结对读者有所帮助。
剩余24页未读,继续阅读
2022-06-30 上传
2022-06-30 上传
2022-06-30 上传
2022-06-30 上传
2022-06-30 上传
2019-08-06 上传

Luffypirate
- 粉丝: 1
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Raspberry Pi OpenCL驱动程序安装与QEMU仿真指南
- Apache RocketMQ Go客户端:全面支持与消息处理功能
- WStage平台:无线传感器网络阶段数据交互技术
- 基于Java SpringBoot和微信小程序的ssm智能仓储系统开发
- CorrectMe项目:自动更正与建议API的开发与应用
- IdeaBiz请求处理程序JAVA:自动化API调用与令牌管理
- 墨西哥面包店研讨会:介绍关键业绩指标(KPI)与评估标准
- 2014年Android音乐播放器源码学习分享
- CleverRecyclerView扩展库:滑动效果与特性增强
- 利用Python和SURF特征识别斑点猫图像
- Wurpr开源PHP MySQL包装器:安全易用且高效
- Scratch少儿编程:Kanon妹系闹钟音效素材包
- 食品分享社交应用的开发教程与功能介绍
- Cookies by lfj.io: 浏览数据智能管理与同步工具
- 掌握SSH框架与SpringMVC Hibernate集成教程
- C语言实现FFT算法及互相关性能优化指南
