自适应控制算法实现与模型参考设计
"模型参考自适应控制是一种控制理论,用于设计能够自动调整其参数以适应系统不确定性的控制器。本文档详细介绍了如何实现这种控制策略,包括具体的算法和编程代码,适用于学习和理解自适应控制技术。"
在自适应控制领域,模型参考自适应控制(Model Reference Adaptive Control, MRAC)是一个重要的概念,它允许控制器自我调整,以适应系统参数的变化或者未知特性。在标题提及的场景中,目标是设计一个自适应控制器,使得一个具有未知参数的被控对象的输出能够跟随一个期望的阶跃函数。
1. 模型参考自适应控制系统方框图
控制系统由两部分组成:参考模型和实际被控对象。参考模型输出期望的系统行为,而实际输出则反映了系统在当前控制策略下的表现。通过比较两者之间的误差,自适应机制会调整控制器参数,以减小这个误差并最终实现零误差跟踪。
2. 输入—输出的模型参考自适应控制系统设计
- 参考模型:参考模型的选择至关重要,它应该具有理想的动态特性,比如无稳态误差和合适的响应速度。设计时,参考模型的阶次与被控对象相同,以确保两者可以进行比较。
- 自适应控制器:设计时需确保控制器输出的相对阶为1,这可以通过选择适当的增益和多项式来实现。辅助信号发生器的状态方程和参数调节规律也在此过程中扮演关键角色。
3. 控制算法
- 初始化:设置初始参数,如估计值、误差等。
- 迭代计算:通过数值积分法更新状态变量和参数估计。
- 控制量计算:根据更新后的信息计算控制输入。
- 移位处理:更新系统状态并判断是否达到预设条件,如果未达到,则继续循环,否则停止运行。
4. 程序实现
提供的MATLAB程序展示了如何将上述理论应用于实际的模拟环境,通过初始化、计算和迭代过程,实现自适应控制算法的运行。
模型参考自适应控制的优势在于其能够应对系统参数的不精确性或变化,以及未知的非线性特性。然而,实际应用中需要注意的是,自适应控制可能会增加系统的复杂性,且在某些情况下可能会出现振荡或不稳定。因此,在设计和实施自适应控制策略时,需要仔细考虑系统的动态特性和稳定性需求。
题目:某被控对象传递函数为
式中参数 未知, ,试设计自适应控制器,使系统输出跟踪阶跃函数 。
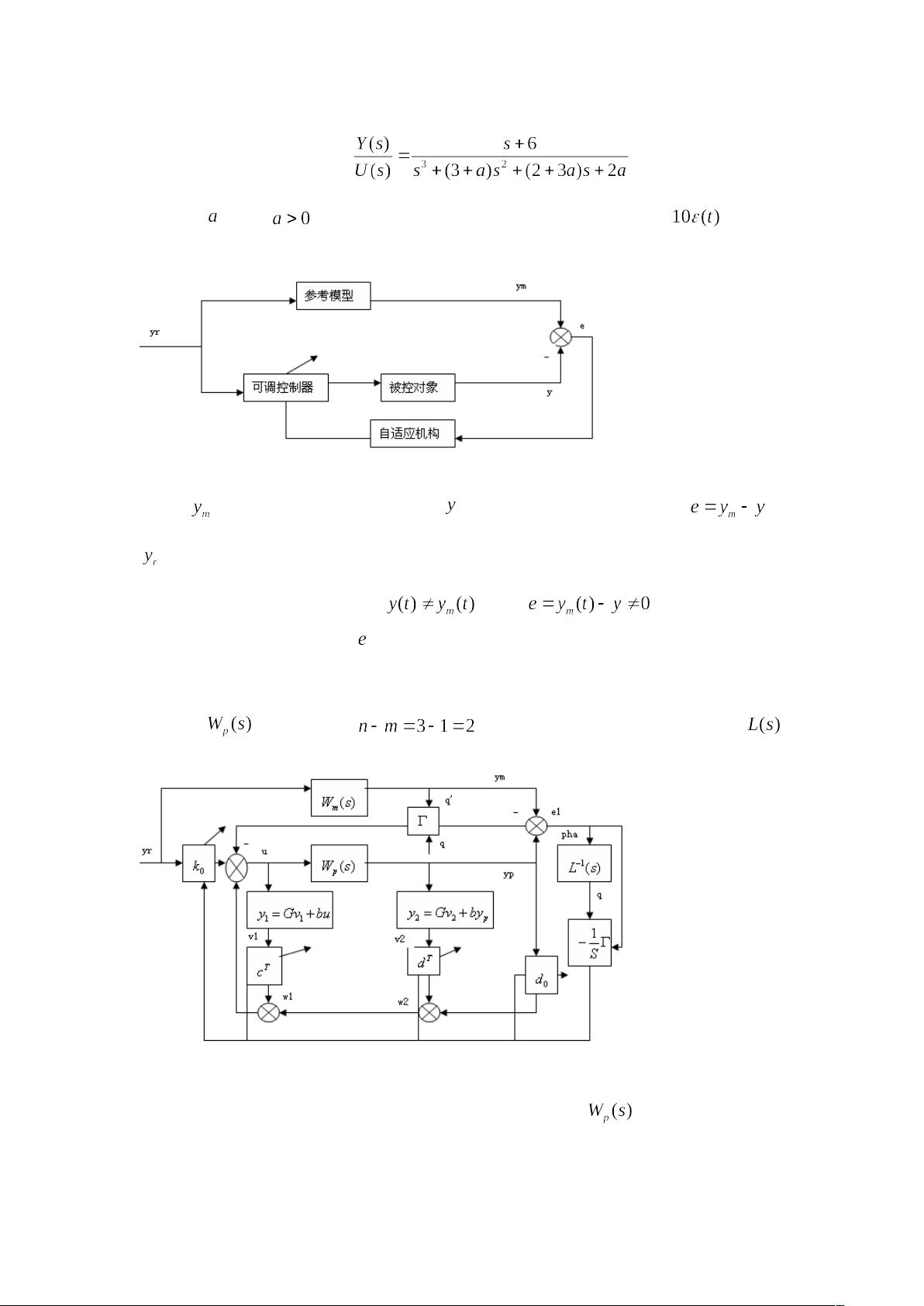
1、 模型参考自适应控制系统方框图
其中, 为参考模型输出,即期望输出, 为被控对象或过程实际输出,且 ,
为输入。
由于系统的不确定性,一般有 ,从而 ,它驱动自适应机
构作用,调节控制器参数,使 减小,直至为零时停止调节。此时,对象的实际输出达到
期望输出。
2、 利用输入—输出的模型参考自适应控制系统设计
根据 知,相对阶为 ,模型参考自适应控制应增设多项式 ,
控制系统结构如下图所示:
(1) 参考模型的确定。参考模型的选择应使其输出具有理想的特性,如无稳态误差,
适当的动态指标,并且其分子分母的阶次应与过程 相同。
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-10-24 上传
2022-07-13 上传
2023-05-21 上传
2022-07-14 上传
2021-03-19 上传
2023-03-30 上传

qiaopengpeng1987
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 创建个性化的Discord聊天机器人教程
- RequireJS实现单页应用延迟加载模块示例教程
- 基于Java+Applet的聊天系统毕业设计项目
- 从HTML到JSX的转换实战教程
- 轻量级滚动到顶部按钮插件-无广告体验
- 探索皇帝多云的天空:MMP 100网站深度解析
- 掌握JavaScript构造函数与原型链的实战应用
- 用香草JS和测试优先方法开发的剪刀石头布游戏
- SensorTagTool: 实现TI SensorTags数据获取的OS X命令行工具
- Vue模块构建与安装教程
- JavaWeb图片浏览小程序毕业设计教程
- 解决 Browserify require与browserify-shim冲突的方法
- Ventuno外卖下载器扩展程序使用体验
- IIT孟买医院模拟申请webapp功能介绍
- 掌握Create React App: 开发Tic-Tac-Toe游戏
- 实现顺序编程与异步操作的wait.for在HarmonyOS2及JavaScript中
