导向滤波器:一种高效边缘保留图像处理技术
需积分: 12 159 浏览量
更新于2024-09-05
收藏 8.12MB PDF 举报
"本文介绍了一种名为‘引导滤波’的新型图像处理技术,由Kaiming He、Jian Sun和Xiaoou Tang三位作者提出。这种滤波器基于局部线性模型,能够根据引导图像(可以是输入图像或另一图像)的内容来计算滤波输出,从而在保留边缘的同时进行平滑处理。与双边滤波器相比,引导滤波器在边缘附近的性能更优。此外,它不仅限于平滑操作,还能用于如去雾、引导羽化等新应用。其算法执行速度快,接近线性时间复杂度,不受核大小和强度范围影响,是目前最快的边缘保持滤波器之一。实验验证了引导滤波器在计算机视觉和计算机图形学领域的广泛适用性,如边缘感知平滑、细节增强、HDR压缩、图像抠图/羽化、去雾、联合上采样等任务中表现出高效性和有效性。"
在图像处理领域,引导滤波是一种重要的技术,它源于局部线性模型,其核心思想是利用一个指导图像(可以是原始图像或其他图像)来指导滤波过程。相比于传统的平滑滤波器,如高斯滤波器,引导滤波器能更好地保持图像的边缘特性,避免了过度模糊。这在处理图像时尤其重要,因为边缘通常包含关键的图像信息。
双边滤波器是另一种常用的边缘保留滤波器,它结合了空间信息和像素值的相似性来决定滤波的程度。然而,在某些情况下,双边滤波器可能会在边缘附近产生不理想的效果,如颜色泄露或模糊。引导滤波器则通过更加细致地考虑引导图像的局部信息,改进了这一点,提供了更精确的边缘保持效果。
引导滤波器的另一个优势在于它的通用性。除了平滑操作,它还可以用来传输引导图像的结构信息,实现新的图像处理应用。例如,去雾处理可以利用未受雾影响的区域作为引导图像,恢复清晰的图像细节;引导羽化则可以在指定区域进行柔和过渡,如在图像合成中创建自然的边缘融合效果。
此外,由于其算法设计,引导滤波器的执行速度非常快,时间复杂度接近线性,这使得它在处理大尺寸图像或者实时应用中具有显著优势。不论滤波核的大小或强度范围如何,这种效率都不会受到影响,使得它成为实时图像处理和大规模数据处理的理想选择。
在实际应用中,引导滤波器已经在多个方面显示出了其价值。例如,边缘感知平滑可以有效地去除噪声同时保持边缘清晰;细节增强可以突出图像中的微小特征;HDR(高动态范围)压缩则可以将高动态范围图像转换为适合显示的低动态范围图像,同时保留丰富的细节;图像抠图/羽化对于图像合成和背景替换非常有用;去雾功能可以恢复雾天图像的真实景象;联合上采样则能提高图像分辨率,改善图像质量。
引导滤波器是一种强大而灵活的图像处理工具,它结合了高效、精确和多用途的特点,广泛应用于计算机视觉和计算机图形学的各种任务中,极大地扩展了图像处理的可能性。在MATLAB这样的环境中,可以方便地实现和应用引导滤波算法,为科研和工程实践提供了便利。
It has been observed that these implicit filters are closely
related to the explicit ones. In [43], Elad shows that the
bilateral filter is one Jacobi iteration in solving the Gaussian
affinity matrix. The Hierarchical Local Adaptive Precondi-
tioners [41] and the Edge-Avoiding W avelets [37] are
constructed in a similar manner. In this paper, we show
that the guided filter is closely related to the matting
Laplacian matrix [10].
2.3 Nonaverage Filters
Edge-preserving filtering can also be achieved by nonaver-
age filters. The median filter [2] is a well-known edge-aware
operator, and is a special case of local histogram filters [44].
Histogram filters have Oð NÞ time implementations in a way
as the bilateral grid. The Total-Variation (TV) filters [45]
optimize an L
1
-regularized cost function, and are shown
equivalent to iterative median filtering [46]. The L
1
cost
function can also be optimized via half-quadratic split [47],
alternating between a quadratic model and soft shrinkage
(thresholding). Recently, Paris et al. [48] proposed manip-
ulating the coefficients of the Laplacian Pyramid around
each pixel for edge-aware filtering. Xu et al. [49] propose
optimizing an L
0
-regularized cost function favoring piece-
wise constant solutions. The nonaverage filters are often
computationally expensive.
3GUIDED FILTER
We first define a general linear translation-variant filtering
process, which involves a guidance image I, an filtering
input image p, and an output image q. Both I and p are
given beforehand according to the application, and they can
be identical. The filtering output at a pixel i is expressed as
a weighted average:
q
i
¼
X
j
W
ij
ðIÞp
j
; ð1Þ
where i and j are pixel indexes. The filter kernel W
ij
is a
function of the guidance image I and independent of p. This
filter is linear with respect to p.
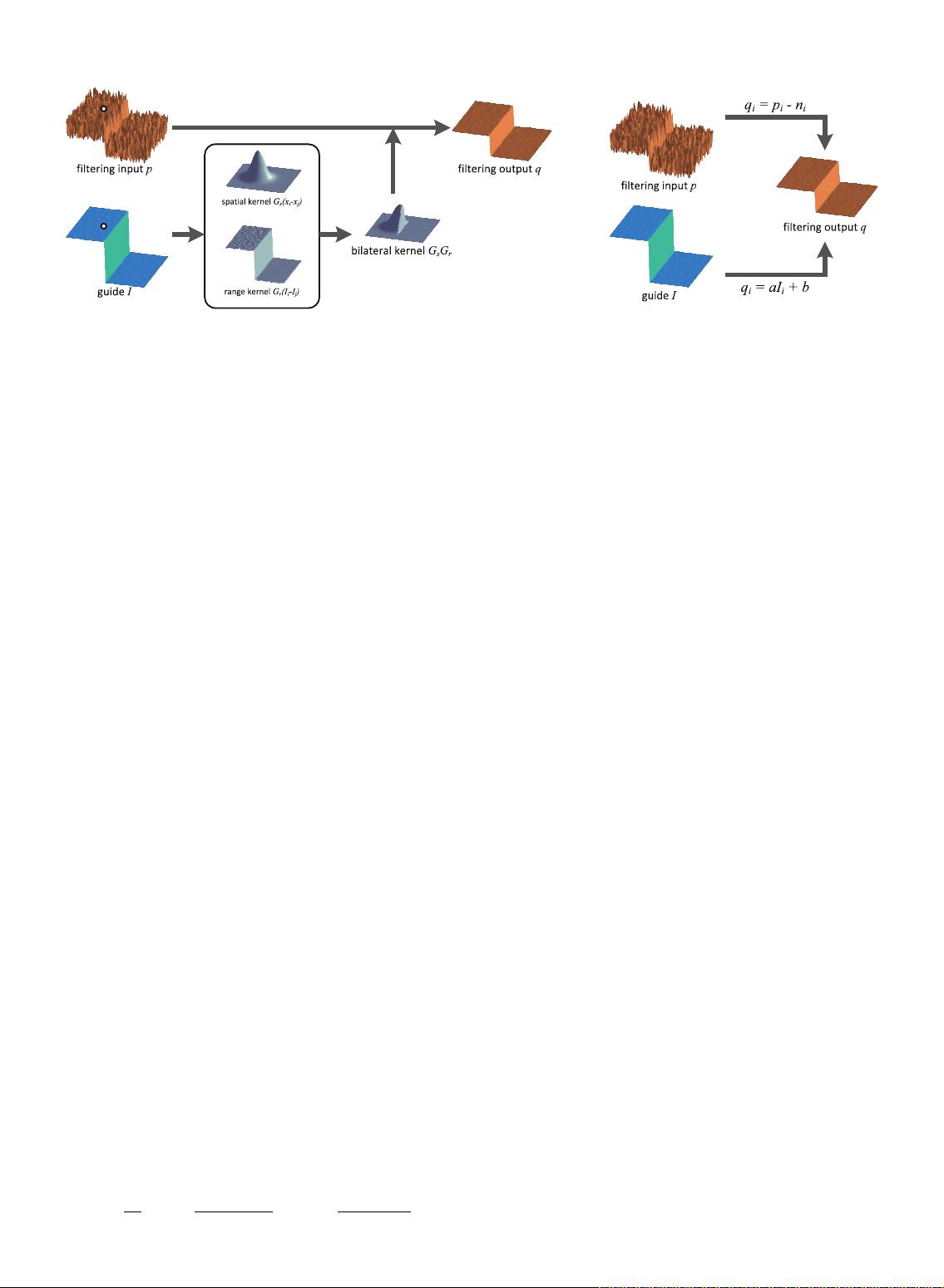
An example of such a filter is the joint bilateral filter [14]
(Fig. 1 (left)). The bilateral filtering kernel W
bf
is given by
W
bf
ij
ðIÞ¼
1
K
i
exp
k x
i
x
j
k
2
2
s
exp
k I
i
I
j
k
2
2
r
; ð2Þ
where x is the pixel coordinate and K
i
is a normalizing
parameter to ensure that
P
j
W
bf
ij
¼ 1. The parameters
s
and
r
adjust the sensitivity of the spatial similarity and the
range (intensity/color) similarity, respectively. The joint
bilateral filter degrades to the original bilateral filter [1]
when I and p are identical.
The implicit weighted-average filters (in Section 2.2)
optimize a quadratic function and solve a linear system in
this form:
Aq ¼ p; ð3Þ
where q and p are N-by-1 vectors concatenating fq
i
g and
fp
i
g, respectively, and A is an N-by-N matrix only depends
on I. The solution to (3), i.e., q ¼ A
1
p, has the same form as
(1), with W
ij
¼ðA
1
Þ
ij
.
3.1 Definition
Now we define the guided filter. The key assumption of the
guided filter is a local linear model between the guidance I
and the filtering output q. We assume that q is a linear
transform of I in a window !
k
centered at the pixel k:
q
i
¼ a
k
I
i
þ b
k
; 8i 2 !
k
; ð4Þ
where ða
k
;b
k
Þ are some linear coefficients assumed to be
constant in !
k
. We use a square window of a radius r. This
local linear model ensures that q has an edge only if I has an
edge, because rq ¼ arI. This model has been proven
useful in image super-resolution [50], image matting [10],
and dehazing [11].
To determine the linear coefficients ða
k
;b
k
Þ, we need
constraints from the filtering input p. We model the output q
as the input p subtracting some unwanted components n
like noise/textures:
q
i
¼ p
i
n
i
: ð5Þ
We seek a solution that minimizes the difference between q
and p while maintaining the linear model (4). Specifically,
we minimize the following cost function in the window !
k
:
Eða
k
;b
k
Þ¼
X
i2!
k
a
k
I
i
þ b
k
p
i
2
þ a
2
k
: ð6Þ
Here, is a regularization parameter penalizing large a
k
.We
will investigate its i ntuitive meaning in Section 3.2.
Equation (6) is the linear ridge regression model [51], [52]
and its solution is given by
HE ET AL.: GUIDED IMAGE FILTERING 1399
Fig. 1. Illustrations of the bilateral filtering process (left) and the guided filtering process (right).
剩余12页未读,继续阅读
2020-05-27 上传
2017-09-14 上传
2017-09-15 上传
2015-12-03 上传
2013-12-15 上传
2021-05-24 上传
点击了解资源详情

jiamgcool
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







