机器人专用输入输出信号详解
版权申诉
PDF格式 | 850KB |
更新于2024-07-03
| 156 浏览量 | 举报
"専用输入输出信号.pdf" 文件主要探讨了机器人系统中专用的输入输出信号(UI/UO)的配置和功能,涉及到多个控制信号及其在不同情况下的应用。
1. 専用輸入信號 - IMSTP (Immediate Stop)
IMSTP信号用于紧急停止操作。当这个信号的B接点被接通时,表示软件上的紧急停止回路被激活,机器会立即进入紧急停止状态。通常,这个信号会与安全插头、紧急开关和教学模式开关等设备连接。值得注意的是,如果B接点不使用,应将其短路,因为紧急停止对机械设备的冲击较大,一般情况下建议使用"HOLD"信号来暂时停止机器人。
2. HOLD (一時停止)
HOLD信号用于实现临时停止。当HOLD信号输入到OFF状态时,机器人会减速并停止,进入PAUSE状态。要重新启动机器人,需要先将HOLD信号设置为ON,然后通过START信号进行复位。
3. SFSPD (Safe Speed) - 安全速度监控
这个信号可能用于监控机器人的运行速度,确保其在安全范围内。如果检测到超速,SFSPD信号会触发停止机制以防止潜在危险。
4. 其他专用输入输出信号
文件中还提到了其他一些信号,如CSTOPI(可能是控制器停止指示)、START(启动)、HOME(回家位置)、ENBL(启用)、PNS1/RSR1至PNS8/RSR8(可能是多个可编程的输入/输出信号,用于特定功能或设备通信)、0V(地线)以及各种ACK(确认)和SNO(序列号)信号,它们通常涉及机器人与周边设备之间的通信和交互。
5. 接口配置
以上信号通过CRM2A Connector与机器人和其他设备连接。接口包括了各种输入和输出信号的分配,如ACK和SNO系列信号用于通信确认,COM-A1至COM-A5可能是串行通信端口,而PNSSTROBE可能用于同步数据传输,PRODSTART可能用于生产开始信号,SDI01和SDI02可能是数字输入信号,CMDENBL(命令启用),SYSRDY(系统就绪),PROGRUN(程序运行),PAUSED(暂停),ATPERCH(自动停泊),TPENBL(工具启用),HELD(保持),FAULT(故障),BATALM(取消报警),BUSY(忙碌),FAULTRESET(故障复位)等。
6. 注意事项
文件强调了正确配置和使用这些信号的重要性,特别是安全相关的信号,如紧急停止和临时停止信号。未正确使用的信号可能导致系统错误或安全风险。
这些信号是机器人控制系统的关键组成部分,用于实现精确、安全的自动化操作。理解并正确使用这些专用输入输出信号对于有效控制和监控机器人系统至关重要。
[ 専用輸入輸出信號 UI/UO ]
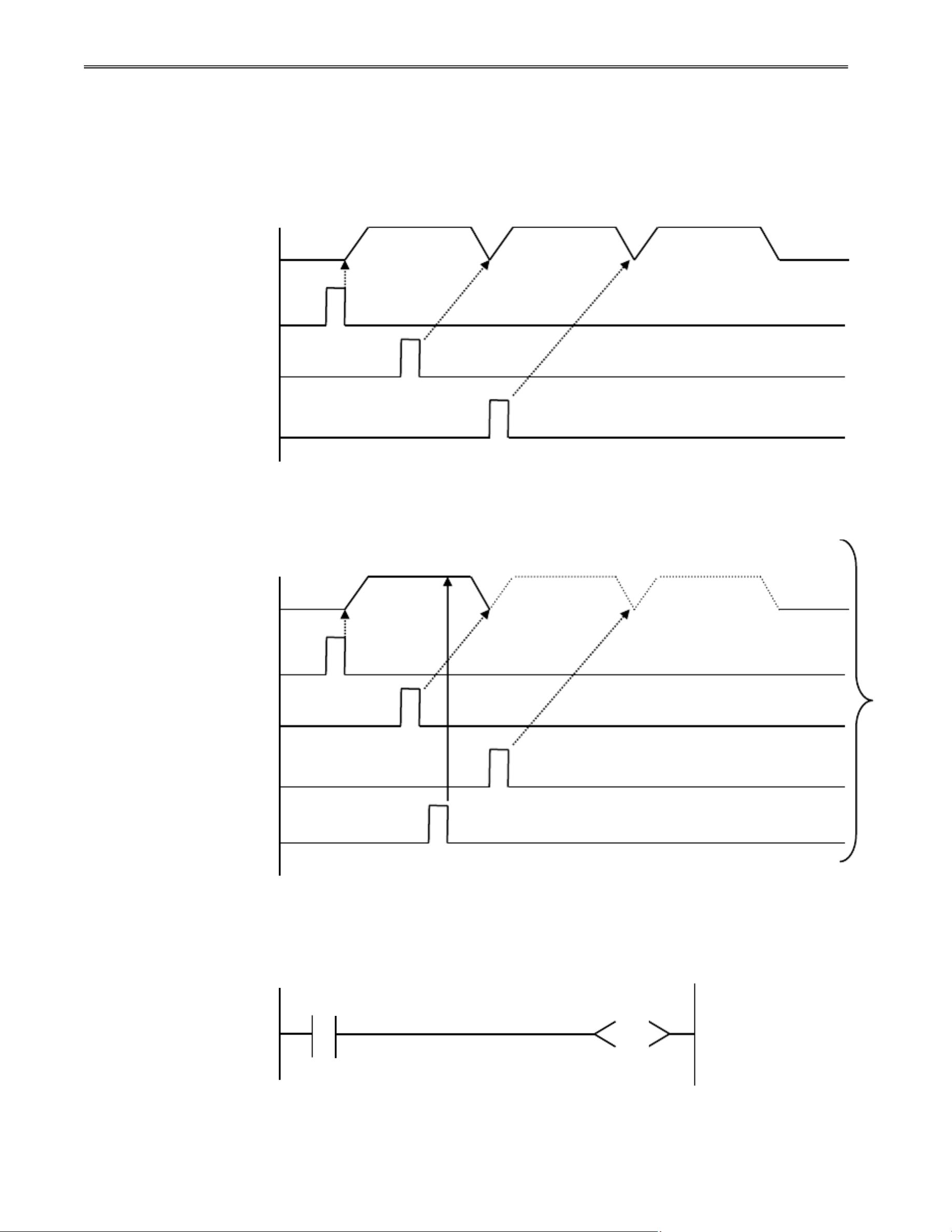
4 CSTOP1(CYCLE STOP INPUT)RSR /PNS 預約解除
4.1 意義:
RSR/PNS 初期启动信号之取消信号。
<CSTOP1 輸入前>
<CSTOP1 輸入後>
4.2 信號之使用範例(Relay 或 PLC)(RSR 未使用時、不要使用):
RSR 預約解除
(CYCLE STOP)
X012
CSTOP1
Y104
CSTOP1
RSR3
RSR2
RSR1
機器人状態
動作中(RSR1 程式)
預約取消
RSR2
預約取消
RSR3
RSR3
RSR2
RSR1
機器人状態
預約 預約
動作中(RSR1 程式)
RSR2 RSR3
4/18
A
剩余17页未读,继续阅读
相关推荐




春哥111
- 粉丝: 1w+
 我的内容管理
展开
我的内容管理
展开







最新资源
- PowerBuilder8操作指南:精确函数与实用示例
- CSS布局与Web标准实战解析
- C#类型转换深度解析:装箱、拆箱与转换技巧
- MIDP 2.0 游戏API实战指南
- 《软件测试艺术》第二版——探索软件测试的精髓
- 新版C#设计模式手册:全面解读23种设计模式
- 英汉对照:人力资源管理常用术语解析
- ASP.NET Form认证详解及单点登录实现
- C#经典教程(下):从语言概述到面向对象设计
- C#入门到精通教程
- 《深入浅出MFC》2/e电子书免费下载
- 《深入浅出MFC》2/e电子书免费下载
- 《深入浅出MFC》2/e电子书免费下载
- 《深入浅出MFC》2/e电子书免费下载
- 《深入浅出MFC》2/e电子书免费下载
- 《目标》:简单常识解决复杂管理的艺术
