KUKA系统软件8.2操作手册:集成商指南
需积分: 50 20 浏览量
更新于2024-07-15
1
收藏 12.66MB PDF 举报
KUKA System Software 8.2 是一份针对系统集成商的详细操作和编程指南,由 KUKA Roboter GmbH 发布,日期为 2011 年 11 月 2 日。这份文档版本为 KSS8.2 SIV3 en,包含了关于 KUKA 机器人系统的最新软件配置,旨在帮助用户理解和操控 KUKA 机器人控制器。该软件覆盖了核心功能的描述,但也可能包含一些未在文档中详述的可操作功能,用户在替换或进行服务工作时应予以注意。
版权信息表明,未经 KUKA Roboter GmbH 明确许可,不得复制或向第三方披露此文档或其部分。尽管文档内容经过了与所述硬件和软件的一致性检查,但仍然可能存在差异,因此不能完全保证完全符合,KUKA 方会定期更新文档以修正任何错误,并确保技术更新不影响功能。
翻译自原始文档,这份资料可能是 KUKA Intelligent Motion Programming (KIM-PS5) 的一部分,它强调了用户在使用过程中应遵循的官方指导,以确保机器人操作的稳定性和安全性。对于系统集成工程师来说,理解并遵守这些指示至关重要,因为它们涉及到编程、调试、维护和优化 KUKA 机器人的高效运行流程。
KUKA System Software 8.2 提供的功能包括但不限于运动控制、编程接口、安全措施、通信协议以及故障诊断工具。通过学习和应用这份文档,集成商能够更好地集成 KUKA 机器人到生产线中,实现自动化任务的精准执行和灵活性。
值得注意的是,这份文档可能会涉及高级编程概念,如CNC编程、FANUC或西门子PLC接口,以及KUKA Robot Language (KRL)的使用。用户在操作之前,应确保对这些技术有基本的理解,或者至少能参考配套的培训材料和在线支持资源。
KUKA System Software 8.2 是一个关键资源,对于提升KUKA机器人系统的性能和安全性,以及避免潜在问题的出现,具有重要的指导价值。阅读和遵循其中的规则是进行有效系统集成和维护的关键步骤。
16 / 391 Issued: 02.11.2011 Version: KSS 8.2 SI V3 en
KUKA System Software 8.2
Additional technology packages, containing application-specific instructions
and configurations, can be installed.
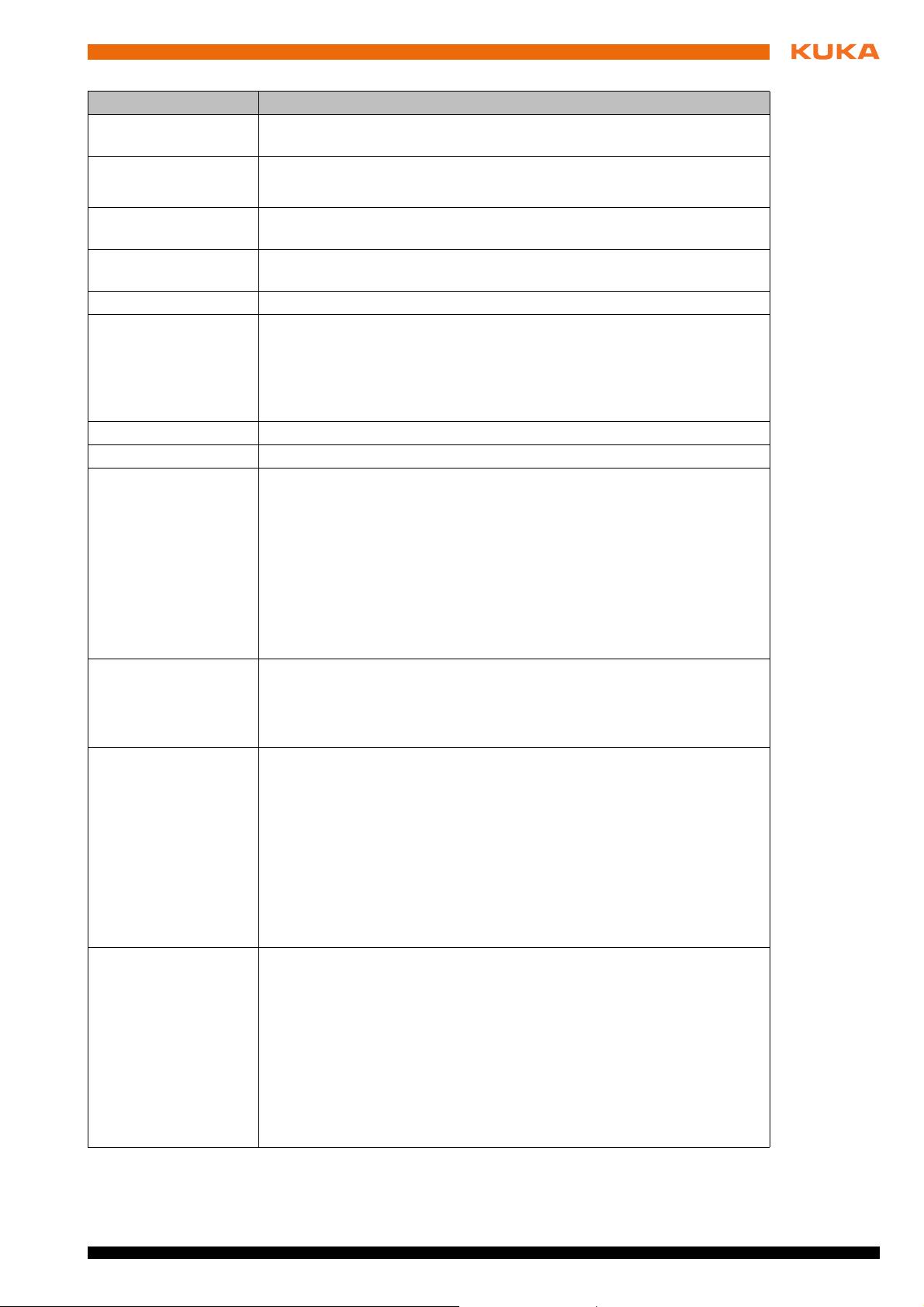
smartHMI The user interface of the KUKA System Software is called KUKA smartHMI
(smart Human-Machine Interface).
Features:
User administration
Program editor
KRL (KUKA Robot Language)
Inline forms for programming
Message display
Configuration window
etc.
(>>> 4.2 "KUKA smartHMI user interface" Page 45)
Depending on customer-specific settings, the user interface may vary
from the standard interface.

剩余390页未读,继续阅读
点击了解资源详情
705 浏览量
148 浏览量
500 浏览量
1185 浏览量
295 浏览量
243 浏览量
864 浏览量
2023-04-25 上传

不爱学习的小边同学
- 粉丝: 7
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- eclipse中文教程
- excelvba设计教程
- 网络协议分类大全 图解
- 存储--基础知识(090202)(1)
- AutoCAD快捷键大全.txt
- 悟透javascript
- 西门子通用型变频器工程师手册
- CC++bianchengguifan.pdf
- PHP与MySQL WEB开发(第四版)(En).pdf
- oracle帮助文档
- 企业员工通讯录管理系统
- Struts_in_Action中文版
- Cambridge.Press.Security.and.Quality.of.Service.in.Ad.Hoc.Wireless.Networks.
- Oracle10g安装、升级、卸载和使用
- mysql-4th-edition-developers-library
- 企业人事管理系统的设计与实现
