"路径跟踪与编队控制下的多主体协同运动研究"
53 浏览量
更新于2024-03-25
收藏 640KB PDF 举报
The research discussed in this paper focuses on the cooperative control of multiple agents moving along a set of given curves. Specifically, the study examines a group of double-integral agents coordinated to move in a specified manner along a set of predefined curves. A projection tracking design method is proposed to design path tracking control and formation protocols, ensuring that a multi-agent system maintains formation motion under directed communication graphs. Conditions for obtaining control gains to solve coordination issues are established when the directed communication graph has globally reachable nodes. Simulation results of ground-level movement among three agents demonstrate the effectiveness of the proposed method. This research, published in J Syst Sci Complex in 2011, presents a valuable contribution to the field of cooperative control of multi-agent systems moving along specified trajectories.
634 YANGYANG CHEN · YUPING TIAN
where x ∈ R and f
i
is a C
2
smooth function of x.
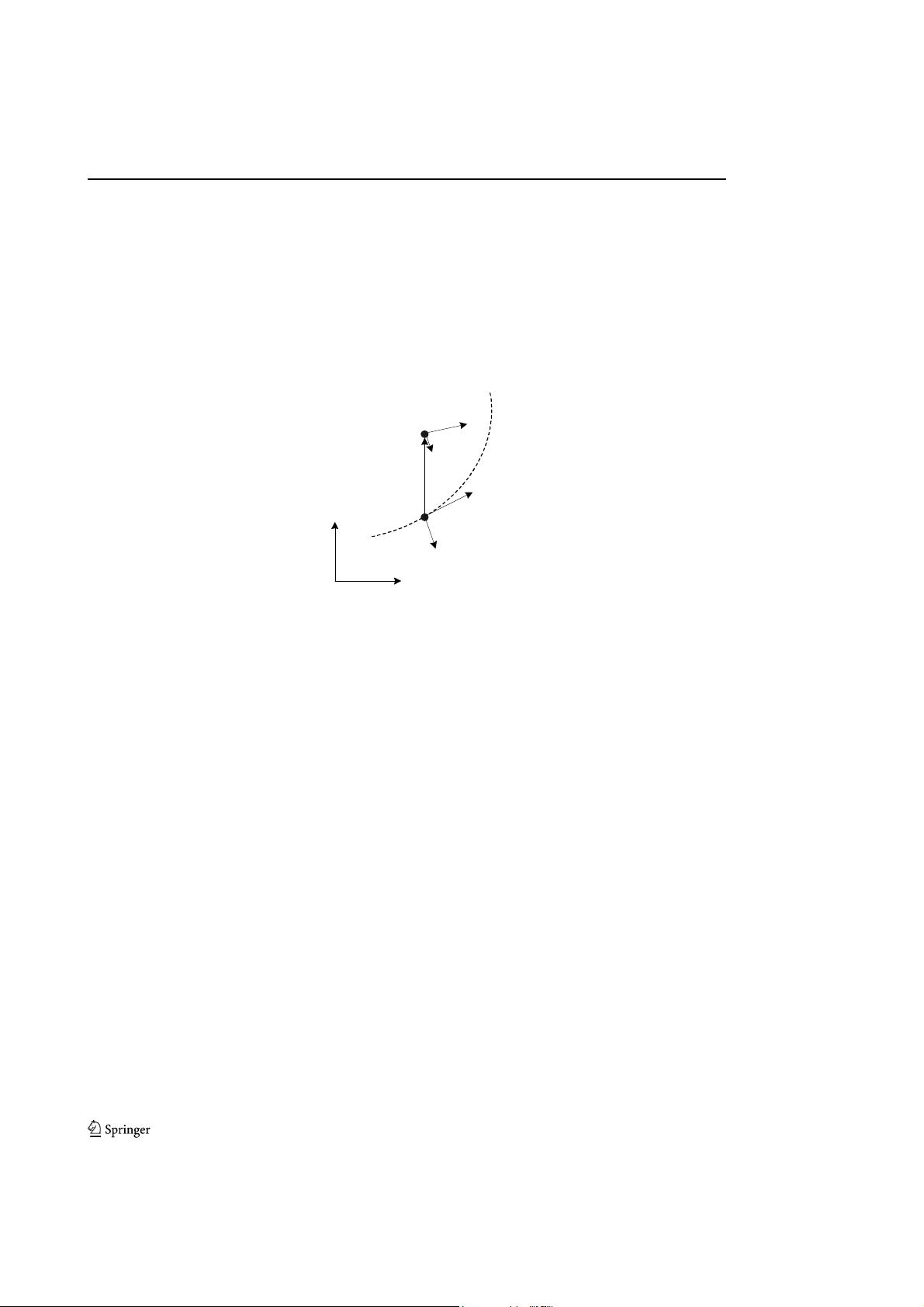
In consideration of a given curve followed by a moving agent, the main idea involved in our
derivation of the path-following control is to vertically project agent i on its given path Γ
i
and
then to drive agent i to approach to its projection β
i
asymptotically (see Figure 1). Due to the
fact that the horizontal coordinate of its projection β
i
is the same as agent i, one can easily
figure out the position of its projection β
i
from the dynamics of agent i such that
z
β
i
=[x
β
i
,y
β
i
]
T
=[x
i
,f
i
(x
i
)]
T
. (3)
i
i
d
i
υ
i
Γ
i
β
i
β
υ
x
y
Normal vector
along the path
Tangent vector
along the path
i
r
o
Figure 1 Path following frame
Let d
i
(t) denote the difference in the longitudinal coordinate between agent i and its cor-
responding projection β
i
. The path following for each agent is achieved by manipulating d
i
(t)
and its derivative r
i
(t)=dd
i
(t)/dt to zero, i.e.,
lim
t→∞
d
i
(t)=0, lim
t→∞
r
i
(t)=0. (4)
Each agent’s acceleration along the normal vector with respect to its curve will be designed to
meet this requirement.
When each agent moves along its given curve, the description of formation for multiple
agents degenerates into the agreement of positions and velocities of the agents along their given
curves. Noticing the special form (2) of each given curve, only one value of y
i
associates with
agivenx
i
. Once the relative abscissa of each pair agents is decided, the relative positions
of agents are uniquely confirmed. Also, the relative positions of agents correspond with one
relative abscissa for each pair. Thus, it is a one-to-one correspondence between the formation
pattern and the relative abscissas of agents. In the simplest case, curve Γ
i
is obtained by moving
a template curve (e.g., the desired trajectory of the group center) along a desired formation
vector h
i
=[h
xi
,h
yi
]
T
as shown in Figure 2. The desired formation z
i
(t) − z
j
(t)=h
i
− h
j
is
equal to the form x
i
(t) − x
j
(t)=h
xi
−h
xj
. Furthermore, it is obvious that this formation can
be ensured by the consensus of both x
i
(t) − h
xi
and ˙x
i
(t). In reality, formation patterns are
complicated and path-dependent. It is hard to use the consensus of x
i
(t) − h
xi
and ˙x
i
(t)to
solve all the complicated formation problems. For instance, consider the coordination depicted
in Figure 3, where agents 1 and 2 must follow path Γ
1
and Γ
2
while maintaining agent 1 “to-
the-right-ahead” agent 2, that is, along straight line that makes an angle of 150 degree with
the positive direction of path Γ
1
. Obviously, the relative position for agents 1 and 2 should
satisfy x
1
(t)=4x
2
(t). If we choose ξ
1
= x
1
and ξ
2
=4x
2
, one can easily observe that the
剩余15页未读,继续阅读
1580 浏览量
1119 浏览量
2197 浏览量
851 浏览量
818 浏览量
813 浏览量
2166 浏览量
1293 浏览量
1254 浏览量

weixin_38642369
- 粉丝: 4
- 资源: 948
 我的内容管理
展开
我的内容管理
展开







最新资源
- java写webapi源码-SwissJeese2014:我的SwissJeese2014演讲材料
- react-webcomponent-example:使Web组件输入元素与React Hooks一起使用的示例代码
- recu-ejercicio2
- MySQL 5.7参考手册 中文版
- 实验.rar
- Halil_Ibrahim_Aslan_Android_Final:HalilİbrahimAslan-19MY93011
- PrestaShop & WordPress-开源
- ReviewSystem:一个基于Node.js,Express,MongoDB和mongoose的快速,简单且功能强大的RESTful API审阅系统
- STM32duino_SPI_MAX31855_MAX31855_arduino_STM32F103_stm32duinospi
- PROKON_4.0.rar(free version)
- rstrong341.github.io
- 16.-15歌词搜索应用-提取
- C#网口打印机、网口打印
- twitter-simple-clone
- TripLight:迷幻视觉合成器颜色-器官风格-开源
- ThinkApp:使用这个有趣且免费的Champion Quiz Master App可用的任何主题测试您的知识。 通过保存查询及其解决方案来节省时间和精力
