"基于51的智能小车设计:避障循迹重力感应遥控"
52 浏览量
更新于2024-01-10
收藏 3.03MB DOC 举报
本设计以C语言为主要开发语言,基于51单片机,结合避障、循迹和重力感应遥控的功能,设计了一款智能小车。该设计背景源于汽车工业的发展和全国各高校对智能小车研究的重视,以及科研项目的需求。智能化作为现代社会的新产物,具有自动化运作的特点,可以完成预期目标,无需人为管理,代表了未来的发展方向。相较于传统的遥控小车,智能小车可以通过计算机编程实现对行驶方向、启停和速度的控制,无需人工干预,具有再编程的特性,是机器人的一种。自1978年中国将智能模拟作为国家科学技术发展规划的主要研究课题以来,智能化研究逐渐引起了人们的关注与重视。因此,本设计的提出与研究意义重大。在设计过程中,教师已经做了充分的准备,并将结合科研项目对其进行指导。
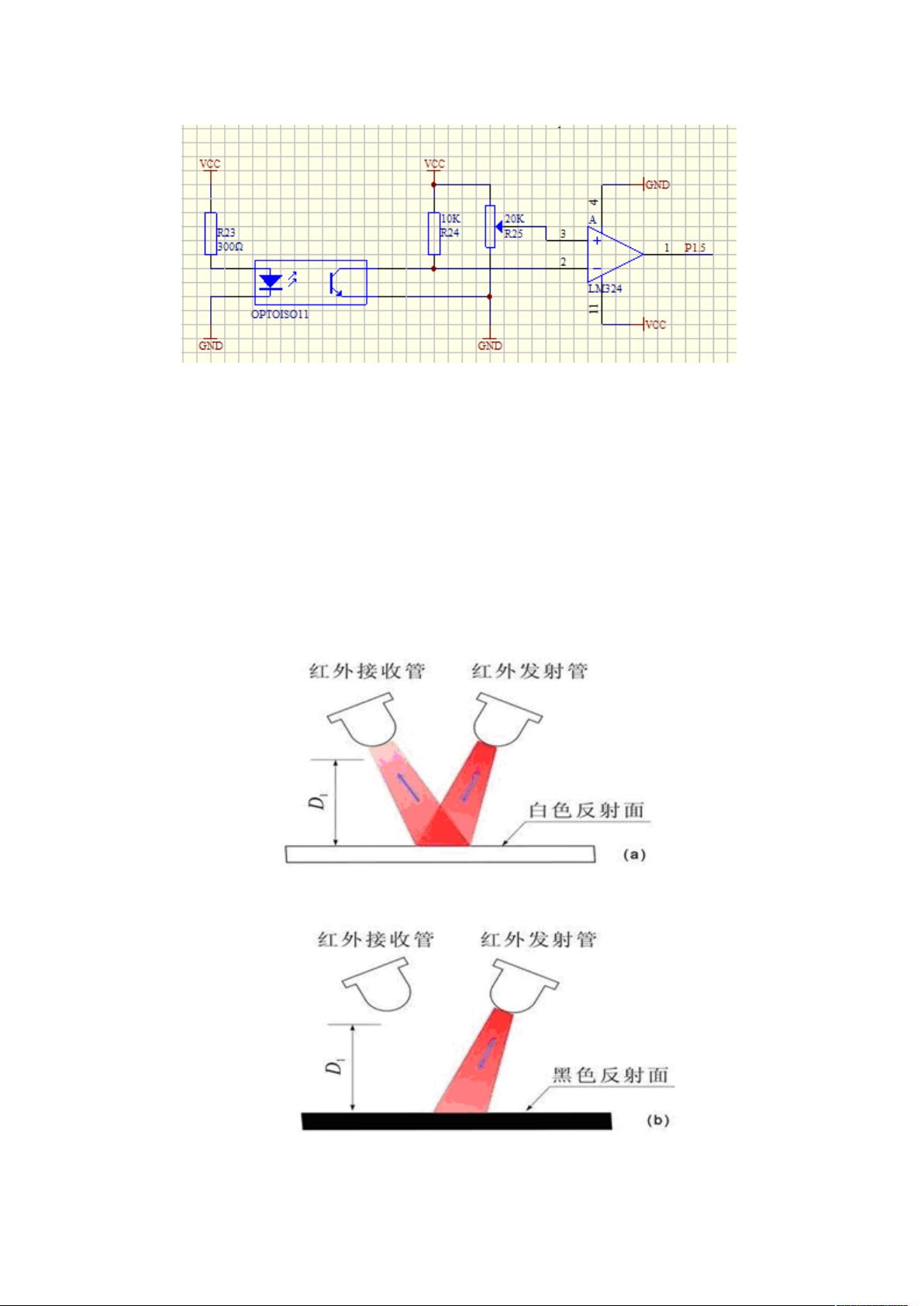
为了实现设计目标,本设计基于51单片机,首先实现了避障功能。通过超声波传感器实时检测周围环境,当检测到障碍物时,智能小车能够自动停车并进行转向,避开障碍物,再启动继续前行。其次,实现了循迹功能。通过红外传感器对地面进行扫描,判断小车当前位置与路径偏离程度,自动调整转向,使小车能够沿着预定的路径行驶。最后,结合重力感应遥控,通过加速度传感器实时感知小车倾斜角度与方向,实现了智能遥控功能。用户可以通过重力感应遥控器,通过倾斜控制小车的转向和速度,实现更加灵活的操作。
这款智能小车的设计具有多种先进的功能,可以适应复杂的环境,实现智能避障、循迹和重力感应遥控。在人们日常生活中,智能小车可以在特定环境内自主运行,提高了车辆的自动化程度,为人们的出行提供了更便捷的选择。同时,这款产品也具有较大的市场潜力,可以为汽车工业和科研项目提供新的应用方向。因此,该设计具有重要的应用前景和市场潜力。
总的来看,本设计以C语言为开发语言,基于51单片机,结合了避障、循迹和重力感应遥控功能,设计了一款智能小车。在背景的支持下,本设计提出了重要的研究意义,为汽车工业、科研项目以及人们日常生活提供了创新的应用方向。未来,随着智能化技术的不断发展,相信这款智能小车将会得到更广泛的应用和推广。
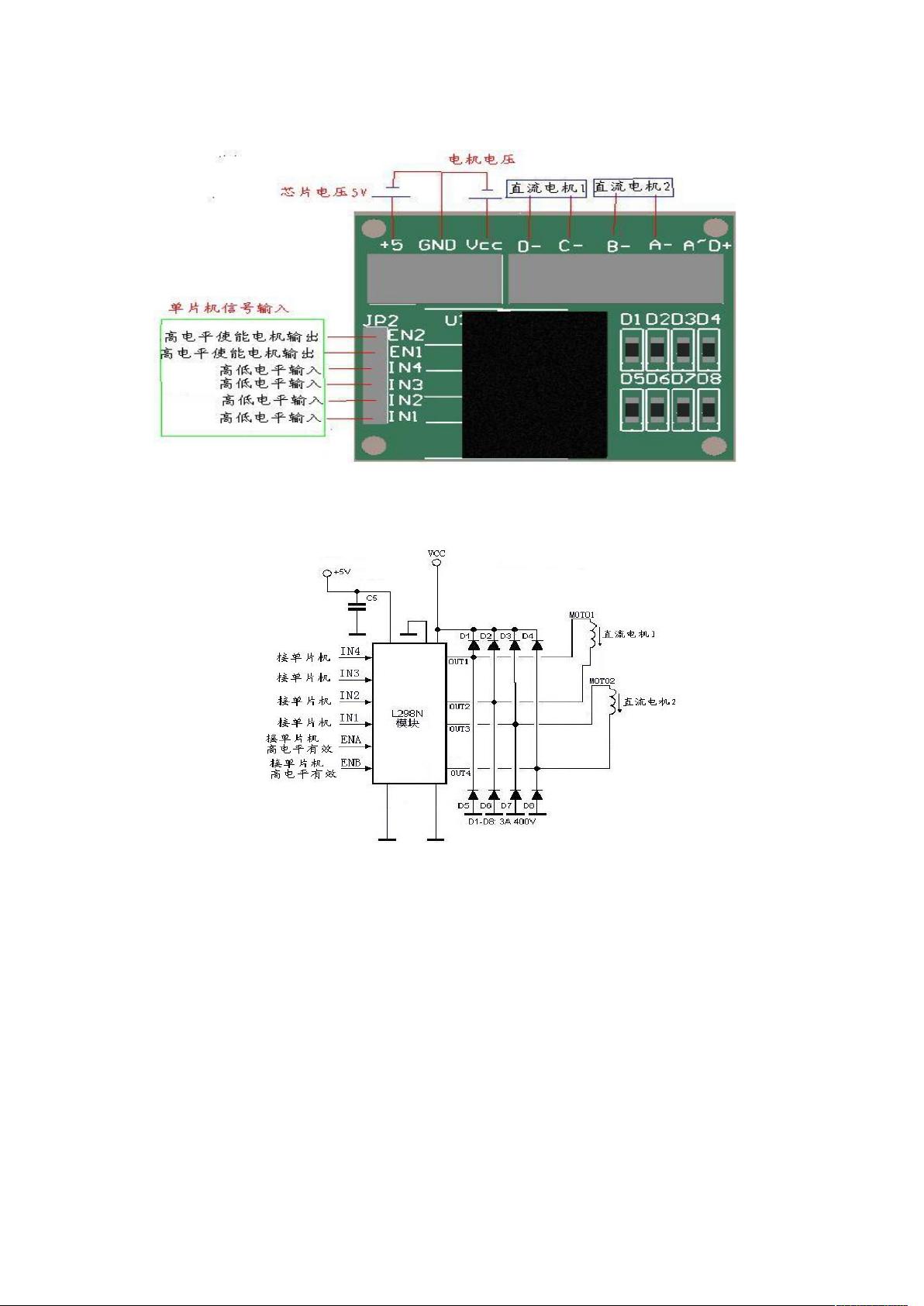
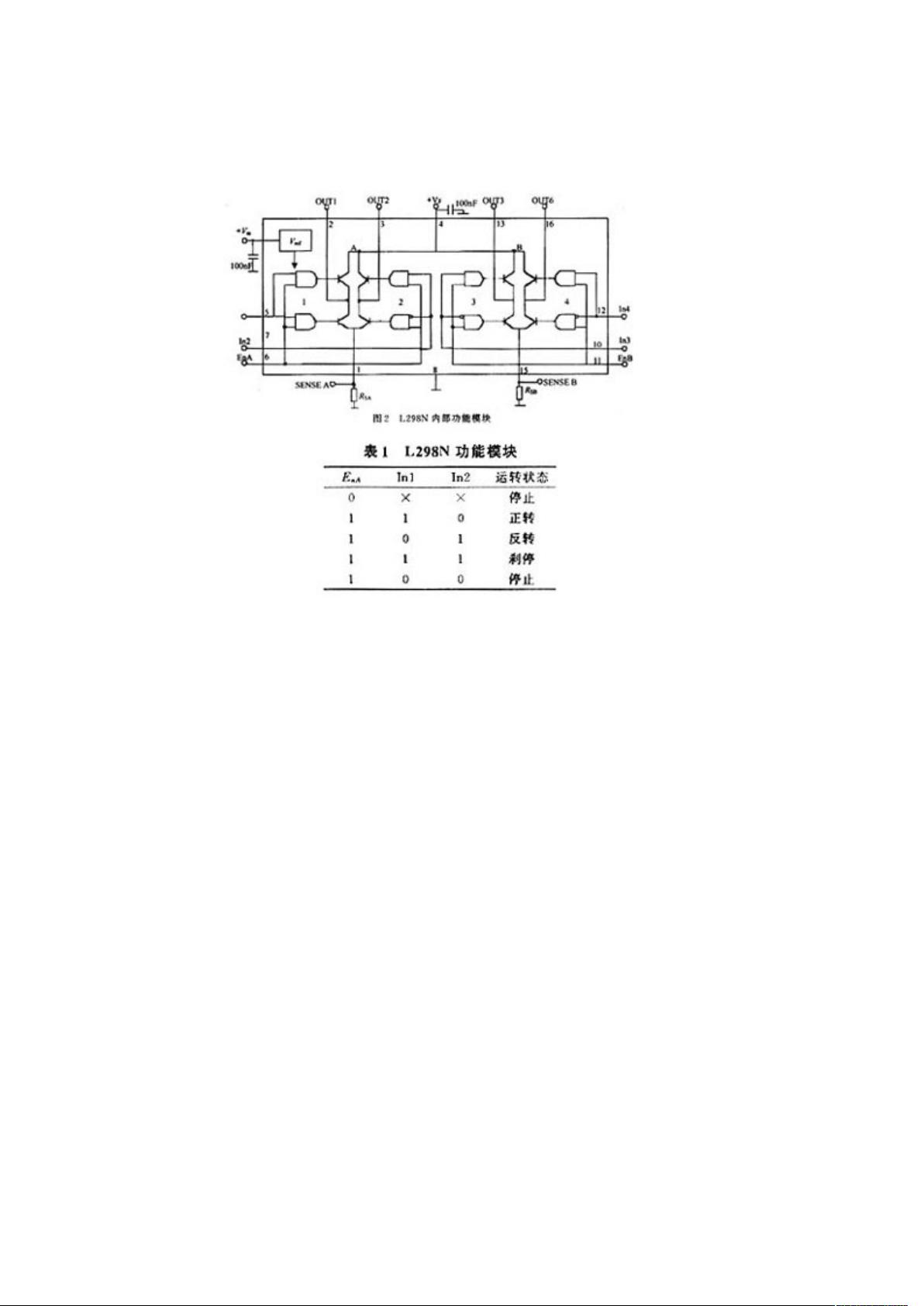
直流电机,实物图及外围电路如下图 6、7 所示。
图 6 L298N 芯片
图 7 L298N 外围电路
接口说明如下示:
+5V:芯片电压 5V。
VCC:电机电压,最大可接 50V。
GND:共地接法。
A-~D-:输出端,接电机。
A~D+ :为步进电机公共端,模块上接了 VCC。
EN1、EN2:高电平有效,EN1、EN2 分别为 IN1 和 IN2、IN3 和 IN4 的使能端。
IN1~ IN4:输入端,输入端电平和输出端电平是对应的。
剩余58页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-06-18 上传
2021-09-16 上传
2023-07-10 上传
2023-07-10 上传
2023-07-10 上传

xinkai1688
- 粉丝: 388
- 资源: 8万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
