三星4412设备树教程:用Pinctrl控制GPIO点亮夜空
需积分: 47 49 浏览量
更新于2024-08-30
收藏 211KB DOCX 举报
"本教程详细讲解了如何利用设备树中的pinctrl控制GPIO,以三星Exynos 4412为例,展示了如何修改设备树文件和使用相关API。适合Linux驱动程序初学者学习。"
在Linux操作系统中,设备树(Device Tree)是一种描述硬件结构的数据结构,它以树形结构表示系统中的所有硬件组件,包括CPU、内存、外设等。设备树使得操作系统能够灵活地适应不同硬件平台,而无需修改大量内核代码。在嵌入式系统中,特别是对于那些基于ARM架构的SoC(System on Chip),设备树尤为重要。
Pinctrl(Pin Control)是Linux内核中用于管理SoC引脚配置的机制。它的引入旨在分离硬件驱动对引脚的具体操作,使得驱动开发者可以专注于功能实现,而不是底层硬件配置。Pinctrl提供了一种抽象接口,允许驱动程序通过标准API来控制引脚的配置,如输入/输出模式、上下拉电阻、速度和电流限制等。这样,即使硬件厂商的引脚配置不同,驱动代码也能保持一致。
在三星Exynos 4412 SoC的例子中,我们需要查阅相关文档,例如内核目录下的`Documentation/devicetree/bindings/pinctrl/samsung-pinctrl.txt`,以了解如何配置pinctrl。在这个例子中,我们关注的是L0-2引脚,其基地址为0x11000000。我们将在`arch/arm/boot/dts/exynos4412-pinctrl.dtsi`文件中添加所需的引脚配置。
为了控制L0-2引脚,我们需要在设备树的适当位置添加节点。在pinctrl_1一级节点下,我们创建了两个子节点,`my_gpio1_high`和`my_gpio1_low`,分别代表高电平和低电平输出。这些节点包含以下关键属性:
1. `samsung,pins`: 指定使用的引脚,这里是"L2-0"。
2. `samsung,pin-function`: 设置引脚的功能,1通常表示输出模式。
3. `samsung,pin-val`: 设置引脚的初始值,1表示高电平,0表示低电平。
4. `samsung,pin-pud`: 设置引脚的上拉或下拉状态,这里使用`EXYNOS_PIN_PULL_UP`表示上拉模式。
完成这些配置后,还需要在设备树的根节点下添加自己的设备节点,以便驱动程序能够找到并使用这些配置。这通常涉及到创建一个新的设备节点,并在其中声明对pinctrl节点的引用。
驱动程序编写时,会通过`of_get_pinctrl()`函数获取到pinctrl对象,然后使用`of_pinctrl_get_function()`来选择配置好的引脚功能,最后使用`pinctrl_select_state()`切换到该功能状态。这样,驱动就能按照设备树中定义的方式正确控制GPIO引脚。
总结来说,通过设备树和pinctrl机制,我们可以高效且灵活地管理三星Exynos 4412 SoC上的GPIO引脚,实现夜空中最亮的灯或其他类似应用。这个过程涉及查找和理解硬件文档、修改设备树文件以及在驱动程序中正确使用pinctrl API。对于Linux驱动开发的学习者而言,这是一个很好的实践案例。
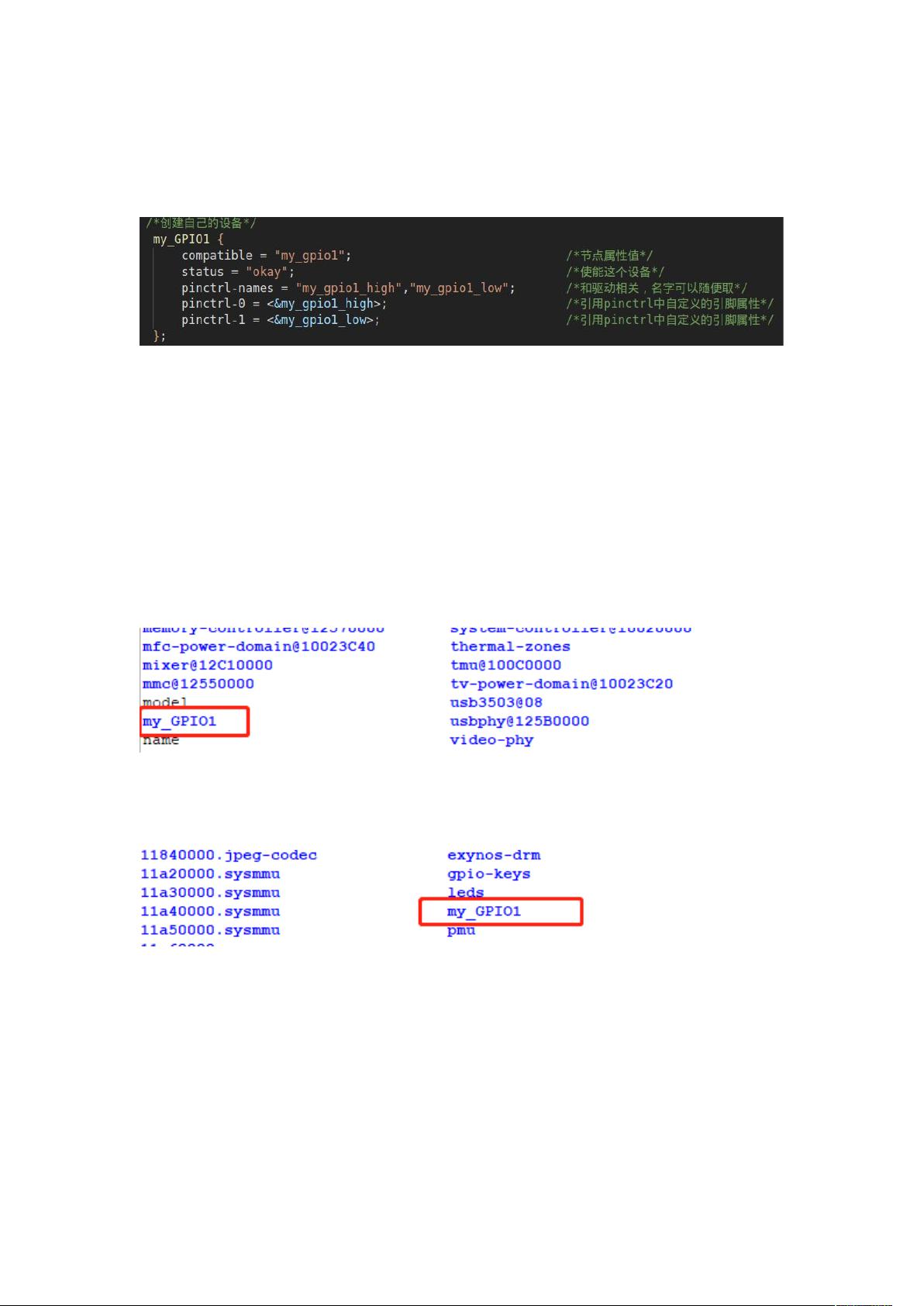
的驱动调用的设备树节点。
在相同目录下我们打开文件 arch/arm/boot/dts/exynos4412-itop-elite.dts 在 根 节
点下创建自己的一级子节点。
这里需要注意的是此处的 pinctrl-0 和上面添加代码的 pinctrl 不是一个意思。这里的
pinctrl-0 表示对应的 pinctrl-name 的第一个属性值,如果 pinctrl-name 有多个属性值,
用逗号隔开。那么各个属性值按顺序会依次对应 pinctrl-0,pinctrl-1,pinctrl-2 ………
到这里我们设备树添加设备相关的工作就已经做完。
在内核目录下使用 make dtbs 编译修改后的设备树文件,如果报错可以使用 root 模
式再次尝试,把生成的 exynos4412-itop-elite.dtb 文件更新到芯片。打开超级终端查看
是否设置成功。
在超级终端中进入 linux 跟文件系统:
在/proc/device-tree 目录下有所有的 node 的信息表明节点已经创建成功
在/sys/devices/platform/目录下有所有设备 node 的信息。表明设备注册了,最后驱动
才能进入 probe
编写对应驱动调用 GPIO
这里我们需要在代码中编写两部分内容
1:杂项设备的注册,这样才可以生成设备节点供上层应用调用
2:注册驱动,注册驱动的 compatible 与设备树中的匹配才能调用驱动
驱动源代码如下:
剩余10页未读,继续阅读
542 浏览量
640 浏览量
点击了解资源详情
311 浏览量
108 浏览量
点击了解资源详情
点击了解资源详情

小小的技术宅
- 粉丝: 4
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 巧用google搜索技术,高效高速搜索
- bash shell英文原版教程
- sg3525涓枃璧勬枡(1).pdf
- 面向对象程序设计vc2
- AdobeInDesginPlugInDevelop
- 大学生求职指南精华版
- Klette R., Rosenfeld A. Digital Geometry.. Geometric Methods for Digital Image Analysis (Morgan Kaufmann, 2004)
- LM311.pdf技术资料
- Beginning Linux Programming (4nd edn)
- 如何获取中文的拼音字母
- IBM DB2通用数据库Windows版快速入门.pdf
- dos通用命令dos通用命令
- ArcObject入门教程
- 基于FPGA的神经网络自整定PID控制器设计
- 约束Delaunay三角剖分动态算法研究
- java基础习题集,非常不错的东东
