Apollo项目导航模式下的坐标转换解析
需积分: 9 76 浏览量
更新于2024-08-05
收藏 1.02MB PDF 举报
" Apollo项目导航模式下的坐标转换研究涉及到自动驾驶领域的关键问题,主要讨论了如何在不同的坐标系之间进行转换,以便于车辆进行精确的路径规划和导航。本文档以Apollo自动驾驶框架为例,阐述了ENU全局坐标系和FLU车身坐标系之间的转换方法,并提供了具体的代码实现。
在Apollo项目中,坐标转换是自动驾驶系统中的核心环节。ENU(East-North-Up)坐标系是一个常用的地理坐标系,其中X指向正东,Y指向正北,Z指向天空。而FLU(Front-Left-Up)车身坐标系则以车辆的前方为X轴正方向,左侧为Y轴正方向,上方为Z轴正方向,它随着车辆的移动和旋转而变化。
在导航模式下,车辆需要在不同的坐标系之间进行坐标转换。例如,已知一个点P在上一帧车身坐标系中的坐标,需要将其转换到当前帧的车身坐标系中,以便实时更新路径规划。这个转换过程涉及到坐标平移和旋转,平移是由于车辆的位置变化,旋转则是由于车辆的方向改变。
转换过程中,当前帧坐标原点(即车辆当前位置)在上一帧车身坐标系中的坐标可以通过两帧车辆位置的差值计算得出。同样,点P在当前帧车身坐标系中的坐标可以通过旋转变换公式计算,该公式结合了车辆的旋转角度差以及上一帧的车身坐标系到当前帧的平移量。
在Apollo的源代码中,`NaviPlanning::RunOnce`函数负责执行一次导航规划,其中包括了坐标转换的逻辑。`ComputeVehicleConfigFromLocalization`函数则用于计算车辆配置,包括位置和方向的变化。在该函数中,利用三角函数计算了车辆在地图坐标系(Map Frame)和平移车辆坐标系(Vehicle Frame)之间的偏移,然后通过向量旋转公式完成了坐标转换。
具体来说,`x_diff_map`和`y_diff_map`分别表示车辆在地图坐标系中的X和Y坐标变化,`cos_map_veh`和`sin_map_veh`是车辆上一帧时的方向余弦值。通过这些值,可以计算出车辆在车辆坐标系中的平移`x_diff_veh`和`y_diff_veh`,以及方向变化`theta_diff`。这些计算结果用于更新车辆状态,并进行后续的路径规划和导航。
Apollo项目中的坐标转换是通过精确的数学模型和编程实现来完成的,确保了自动驾驶系统能够在复杂环境中进行准确的定位和导航。这种坐标转换能力对于自动驾驶汽车的安全行驶至关重要,因为它直接影响到路径规划的精度和实时性。"
开发者说丨Apollo项目导航模式下的坐标转换研究
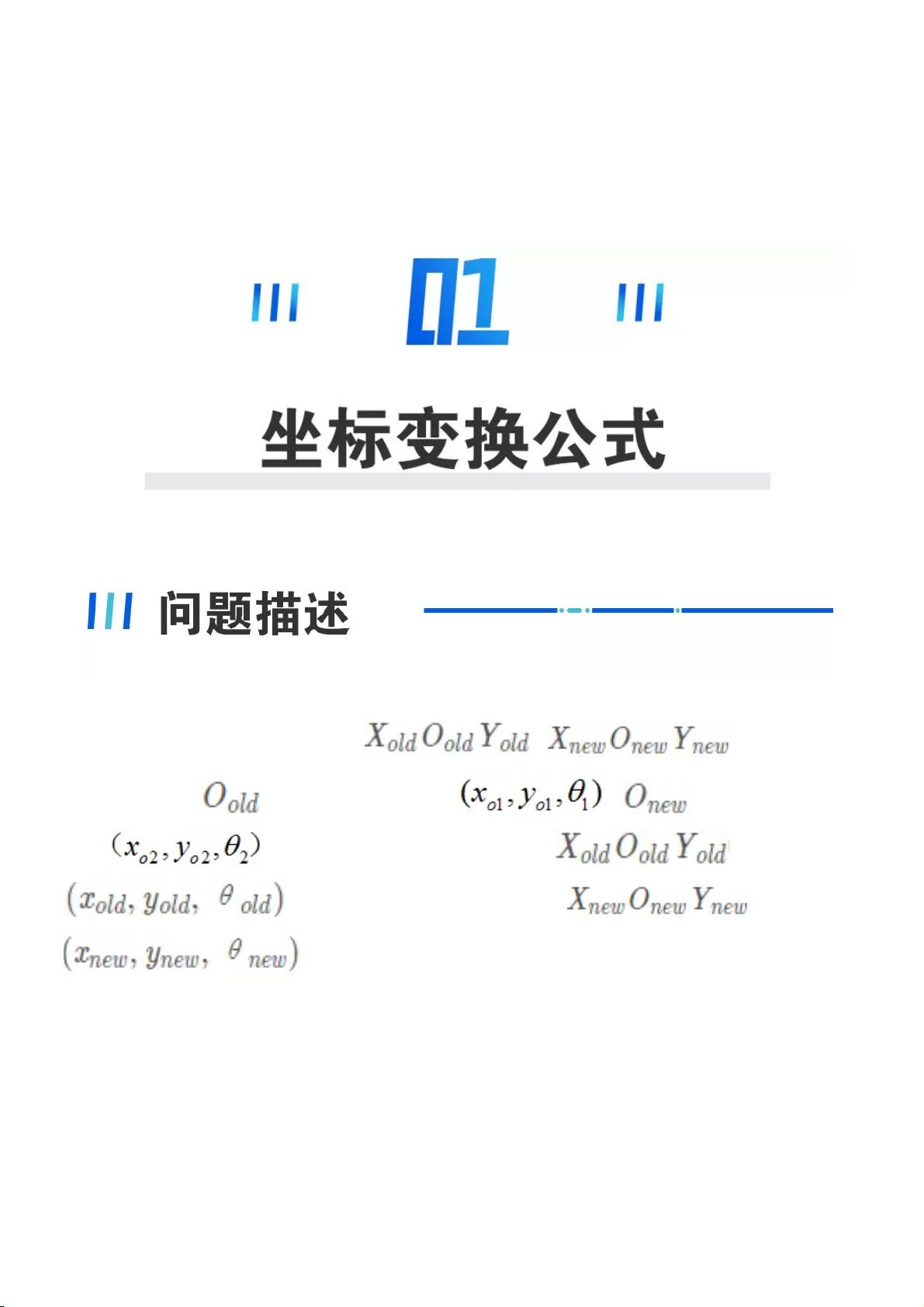
如下图所示,XOY是ENU全局坐标系, 与 是FLU车身坐标
系。已知坐标原点 在坐标系XOY中的坐标为 , 在坐标系XOY中的坐
标 为 。 P 点 在 前 一 帧 车 身 坐 标 系 中 的 坐 标 为
, 求 解 P 点 在 当 前 帧 车 身 坐 标 系 中 的 坐 标 为
。
下载后可阅读完整内容,剩余5页未读,立即下载
2022-05-04 上传
2022-05-04 上传
2022-05-04 上传
2022-05-04 上传
2022-05-04 上传
2022-05-04 上传
2022-05-04 上传
2022-05-04 上传
2022-04-17 上传

疯狂的机器人
- 粉丝: 9012
- 资源: 152
 我的内容管理
展开
我的内容管理
展开







最新资源
- StarModAPI: StarMade 模组开发的Java API工具包
- PHP疫情上报管理系统开发与数据库实现详解
- 中秋节特献:明月祝福Flash动画素材
- Java GUI界面RPi-kee_Pilot:RPi-kee专用控制工具
- 电脑端APK信息提取工具APK Messenger功能介绍
- 探索矩阵连乘算法在C++中的应用
- Airflow教程:入门到工作流程创建
- MIP在Matlab中实现黑白图像处理的开源解决方案
- 图像切割感知分组框架:Matlab中的PG-framework实现
- 计算机科学中的经典算法与应用场景解析
- MiniZinc 编译器:高效解决离散优化问题
- MATLAB工具用于测量静态接触角的开源代码解析
- Python网络服务器项目合作指南
- 使用Matlab实现基础水族馆鱼类跟踪的代码解析
- vagga:基于Rust的用户空间容器化开发工具
- PPAP: 多语言支持的PHP邮政地址解析器项目
