室内多目标跟踪:场景自适应方法与深度不变外观模型
74 浏览量
更新于2024-06-18
收藏 2.05MB PDF 举报
室内多目标跟踪是信息技术领域的一个关键研究方向,尤其是在智能家居和物联网应用日益增长的背景下。本文主要探讨了室内环境下多目标跟踪所面临的特殊挑战,如遮挡、视点截断、尺度变化和姿态变化等问题,这些因素显著增加了数据关联和目标表示的困难。传统的研究方法倾向于通过组合多种特征来提升识别性能,然而这可能导致错误累积和计算负担过重,反而加剧了不确定性。
针对这些问题,作者刘红、王灿和高元提出了两个创新性的解决方案。首先,他们设计了一种场景自适应的分层数据关联方案。这一方案根据实际应用环境动态选择最可靠的特征,通过分层的方式逐渐降低特征组合的复杂度,确保在区分模糊目标时仅使用最低要求的特征。这种方法考虑到了不同场景下特征的可靠性差异,特别适用于像网络摄像机这类广泛应用在复杂室内环境中的设备,其固定的特征选择策略已无法满足多样化需求。
其次,他们开发了一种基于深度不变部分的RGB-D数据的外观模型。RGB-D数据集结合了颜色(RGB)和深度信息,使得外观模型对尺度变化、部分遮挡和视图截断具有更强的鲁棒性。引入RGB-D数据增强了特征多样性,为数据关联中的特征选择提供了更多的维度,从而显著提升了多目标跟踪的整体性能。
为了验证这些方法的有效性,研究者在不同的室内场景中进行了实验。结果表明,他们的场景自适应特征选择、分层数据关联和RGB-D外观模型相结合的方法在多目标跟踪任务中表现出色,不仅提高了准确性和效率,而且适应性强,对于解决室内环境中的跟踪问题具有重要意义。
总结来说,本文的核心贡献在于提出了一种针对室内多目标跟踪的创新策略,通过场景自适应和深度不变部分的RGB-D数据利用,有效解决了数据关联中的难点,并展示了在实际应用场景中的优秀性能。这对于推动智能环境下的实时多目标追踪技术发展具有重要价值。同时,这也强调了在多目标跟踪研究中,适应性和鲁棒性选择特征的重要性,以及如何通过结合不同类型的传感器数据来提升跟踪系统的整体性能。
H. Liu
等人
/CAAI Transactions on Intelligence Technology 1
(
2016
)
210e 224
213
不
不
不
T
T
T
T
.
- 是
的
- 是
的
- 是
的
Σ
阿泰
F
H
K
H
K
在经典关联框架[4,14,28]中,
ri
和
j
之间的链接概率通
常被定义为基于几个特征(如位置、大小、外观等)的属
性的乘积,公式如下:
P
link
r
i
;T
j
¼ A
pos
r
i
; T
j
A
sz
r
i
; T
j
A
ap
r
i
; T
j
/
200
其中,r
i
;
j
表示检测响应r
i
和轨迹片段
j
之间的亲和度,并且
订阅 ‘ap对于每一个关联,以往的工作总是结合这些特征
来计算链接概率,以增加响应的可区分性。这在一些文献
中似乎是有意义的,并且确实取得了很好的结果。然而,
实际的实验和分析表明,基于多个特征的相似度相乘并不
一定能提高鉴别能力,相反,它容易导致多个特征表示的
误差积累,带来不必要的计算开销。
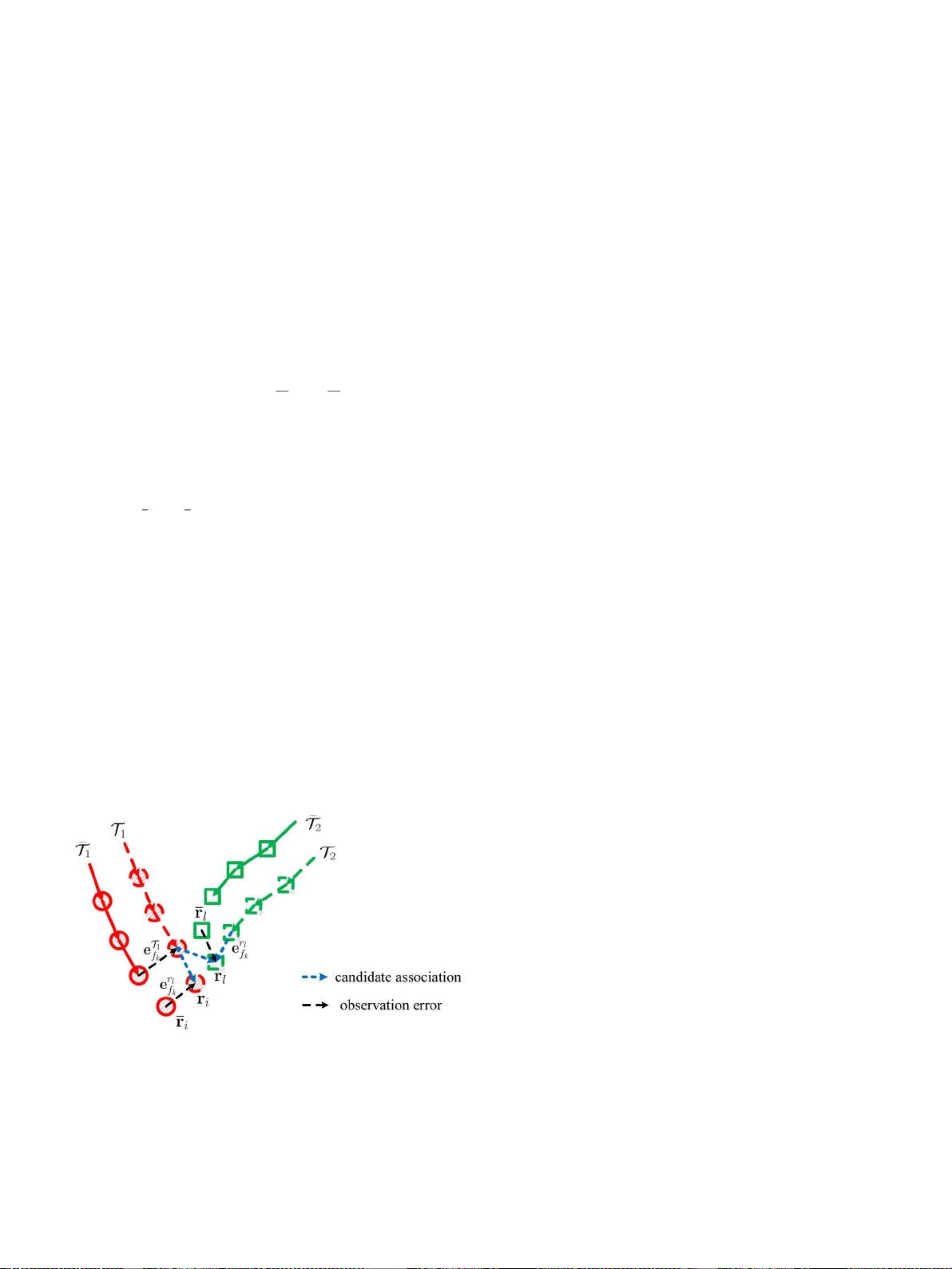
图2给出了观测误差如何影响数据关联的一个简单例
子。设
1
和
2
表示真值 在给定特征空间中的两个轨迹,
换句话说,在给定特征f
k
的表示下。因为任何特征表示都
可以看作是其自身特征空间中的一个数据点。设
1
和
2
表
示其观测值。这里r
i
R1和
R2
表示在当前帧中检测到的两
个检测响应,并且
R1
和
R2
是它们对应的真值。可以看出,
1
和两个响应
ri
和
ri
之间的观测亲和力几乎相同,但真实值不
同
很多这是由于观测误差e
r
i
,e
r
l
和e
T
1
之间
某些特征表示较大,即使检测响应和tracklet属于同一目
标,亲和度也可能较小。因此,这需要一个更合理的数据
关联方案与可靠的特征表示,这是在这项工作中的主要重
点。
3.2.
层次数据关联
如上所述,组合一堆特征可能不会有助于检测响应与
现有轨迹片段之间的更好关联。反之,特征的可靠性或鉴
别力较低,则会对其他可靠的、具有鉴别力的特征产生不
利影响,也会带来不必要的计算开销。这些问题在室内多
目标跟踪中比较突出,原因有二:一是经典方法中最常用
的位置、大小、颜色和外观模型等特征容易受到室内场景
中常见的部分遮挡、视点截断和光照不良等情况的影响,
从而可能给目标表示带来较大的观测误差;二是在这些复
杂情况下,即使是同一目标的检测响应也可能存在较大的
变化。为了解决这些问题,提出了一种新的分层数据关联
方案:
3.2.1.
层次特征空间构造
首先,构造具有用于描述检测响应的各种常用特征
ffk g
的特征空间
F
。基于特征空间
F
,给出了一种生成
式的链接
f
k
f
k
f
k
观察到的检测响应及其在
特征空间。
不幸的是,在实际应用中,几乎所有的特征表示都是
这种情况。这表明,如果在几个特征表示下甚至存在非平
凡的观测误差,则当乘以特征亲和度时,它们将累积,如
公式(2)中的经典工作那样。因此,公式(2)中的最终
链接概率P
link
可能不反映检测响应与轨迹片段之间的真实
亲合性。即使存在具有较小观测误差的可靠和鉴别特征表
示,由于观测误差的累积,它们的鉴别能力也会大大降
低。另一方面,如果在一个
概率公式为:
P
链接
。
r
i
; T
j
jF
Y
A
f
k
.
r
i
;T
j
f
2
F
k
然后,特征空间被重构为K
个
层次,遵循两个规则:
1)
特征空间的较低层次应该用在目标表示上表现出更高
可靠性的特征来构造。换句话说,基于特征f
k
的
目标表
示应该具有较小的观测误差和真实变化。
2)
特征空间的较高层次逐渐比较低层次多一个特征,可
以用公式表示为F
H
k <
$F
H
k-1
<$f f
k
g。
中给出了分层特征空间的简要说明。
J
其中
fr
i
g
和
fT g
表示检测响应,
tracklet被分别关联在层级H
k
中。基于分层数据关联方案,
根据区分歧义检测响应的需要,逐步融合特征,避免了不
必要的计算开销,与同时融合多个特征相比,减少了误差
积累。
图二、观察误差如何影响数据关联的简单示例
3.2.2.
HFS
上的数据关联
在前面模块的基础上,假设选取了K
个
可信度较高的特
征,
剩余15页未读,继续阅读
2023-12-02 上传
2023-07-14 上传
2023-03-31 上传
2023-09-02 上传
2023-05-18 上传
2023-12-02 上传

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Hadoop生态系统与MapReduce详解
- MDS系列三相整流桥模块技术规格与特性
- MFC编程:指针与句柄获取全面解析
- LM06:多模4G高速数据模块,支持GSM至TD-LTE
- 使用Gradle与Nexus构建私有仓库
- JAVA编程规范指南:命名规则与文件样式
- EMC VNX5500 存储系统日常维护指南
- 大数据驱动的互联网用户体验深度管理策略
- 改进型Booth算法:32位浮点阵列乘法器的高速设计与算法比较
- H3CNE网络认证重点知识整理
- Linux环境下MongoDB的详细安装教程
- 压缩文法的等价变换与多余规则删除
- BRMS入门指南:JBOSS安装与基础操作详解
- Win7环境下Android开发环境配置全攻略
- SHT10 C语言程序与LCD1602显示实例及精度校准
- 反垃圾邮件技术:现状与前景
