CANoe仿真网关:Ethernet与CAN报文互转实践教程
需积分: 22 120 浏览量
更新于2024-08-04
收藏 1.42MB PDF 举报
本文主要探讨了如何利用CANoe仿真网关在汽车电子系统中实现Ethernet和CAN报文之间的双向数据转换。随着车辆网络的复杂化,不同网络间的通信需求日益增长,其中CANoe作为一个强大的测试和仿真工具,可以扮演网关(GW)的角色,将标准的控制器局域网络(CAN)与高速的局域网(Ethernet)无缝连接。
首先,作者从实际工作场景出发,介绍了两个关键的功能转换:
1. **以太网帧转CAN报文帧**:在CANoe中,通过创建新的CAN工程,将Ethernet网络添加到CAN网络中,然后配置IG模块来发送UDP数据包。IG模块在这里扮演数据源的角色,发送的UDP数据包需要在CAPL脚本中解析,并根据CAN报文帧的规范构造CAN数据结构,包括数据长度(dlc)、标识符(canId)以及数据字段(canData)。
2. **CAN报文转以太网帧报文**:同样在CAPL脚本中,接收CAN网络中的CAN报文,将其解码并转化为适合以太网传输的格式,可能是TCP/IP协议中的UDP数据包。这涉及解析CAN帧的类型(标准或扩展)、远程请求标志(RTR)以及具体内容,然后填充到gTxBuffer中,准备通过gSocket发送。
在实现过程中,作者提到了几个关键的变量和结构,如UdpSocket对象gSocket用于处理网络通信,以及gRxBuffer和gTxBuffer作为数据暂存区。CANData结构定义了CAN帧的基本元素,包括数据长度、标识符、标志位和数据字段。此外,还定义了常量kPort、kRxBufferSize和kTxBufferSize,用于设置端口号和缓冲区大小。
在CAPL脚本的onstart函数中,初始化必要的网络连接参数,并配置IP地址和地址数组(addresses),这一步是建立网络通信的起点。整体而言,这个过程旨在利用CANoe的灵活性和功能,实现车载网络间的高效数据交换,这对于汽车电子系统的开发和测试至关重要。
在实际应用中,这样的网关设计能够简化系统架构,提高数据传输效率,并支持跨网络通信协议间的兼容性,确保了不同硬件平台之间的有效协作。同时,它也强调了在技术交流中尊重他人观点,避免无意伤害他人的理念,提倡建设性的沟通方式。
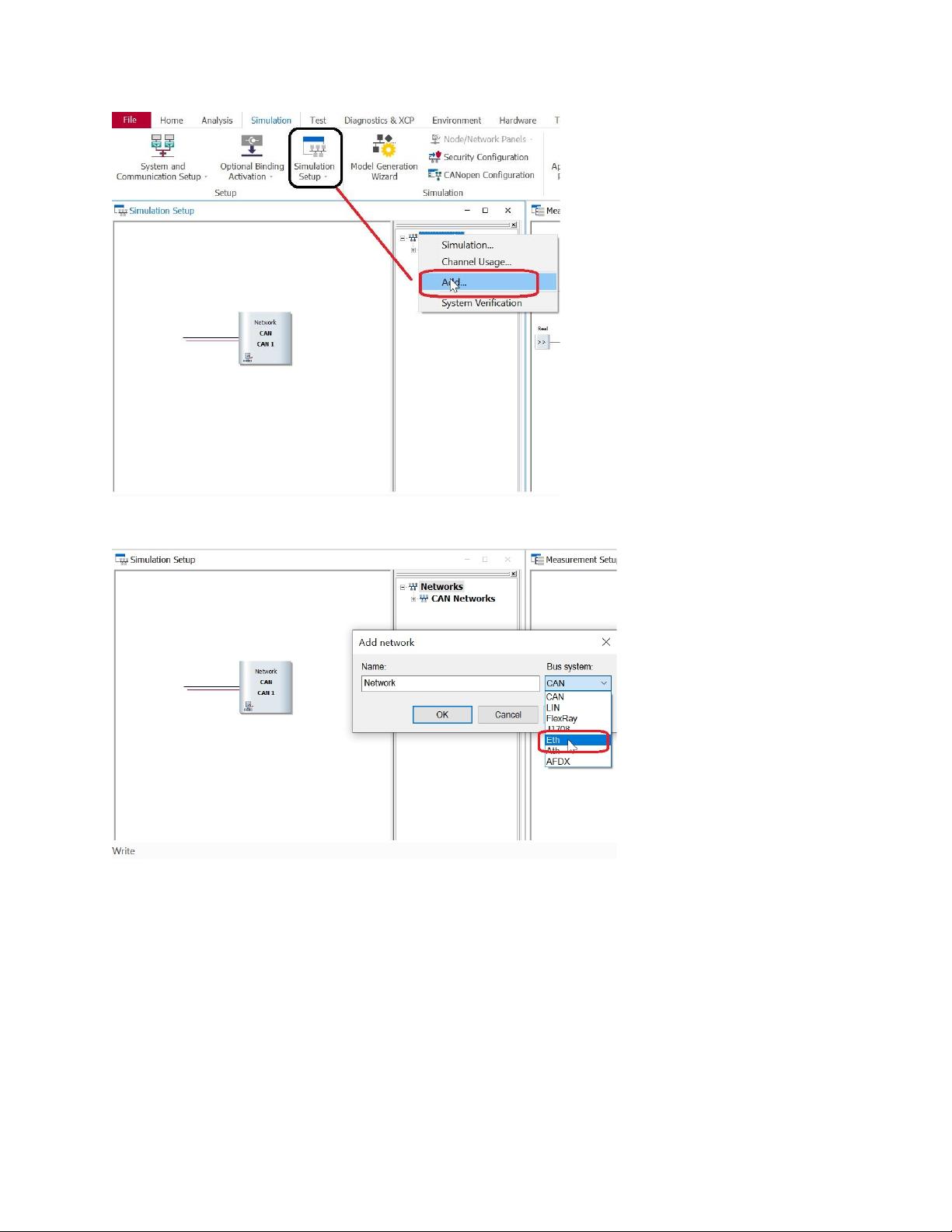
在 CAN 网络上添加添加 Ethernet 网络:
2、 在 CAN 网络中添加节点:
剩余10页未读,继续阅读
2021-10-02 上传
2022-03-09 上传
2021-10-30 上传
2021-07-16 上传
2024-02-25 上传
2019-09-05 上传
2020-12-23 上传
2021-09-05 上传
2021-08-14 上传

车载诊断技术
- 粉丝: 7587
- 资源: 789
 我的内容管理
展开
我的内容管理
展开







