机器人学基础:力学与控制(第三版)英文原版
"《机器人学导论》第三版英文版,由John J. Craig撰写,是电气与计算机工程系列的一部分,内容覆盖了机器人学的基础到高级主题,包括机械和控制方面的知识。"
本书深入介绍了机器人学的关键概念和技术,分为13章,详细阐述了以下几个重要知识点:
1. **介绍**:这一部分可能涵盖机器人学的基本定义、历史以及在现代社会中的应用,为后续章节的学习奠定基础。
2. **空间描述和变换**:这一章讲解了如何在三维空间中描述和操作机器人,包括坐标系的转换、向量和矩阵的操作等基础知识。
3. **操纵器动力学**:讨论了机器人关节和连杆的运动学,包括笛卡尔坐标和关节坐标下的描述,以及如何推导和理解机器人运动链的几何关系。
4. **逆动力学**:这部分涉及求解逆运动学问题,即给定末端执行器的位置和方向,如何确定各关节的运动参数。
5. **雅可比矩阵**:雅可比矩阵关联了关节速度和末端执行器速度,同时也用于计算静态力和力矩,对于理解和设计机器人的控制策略至关重要。
6. **操纵器动力学**:涵盖了机器人动力学模型的建立,包括惯性、摩擦、驱动和约束力的分析,以及如何利用这些信息进行动态建模和控制。
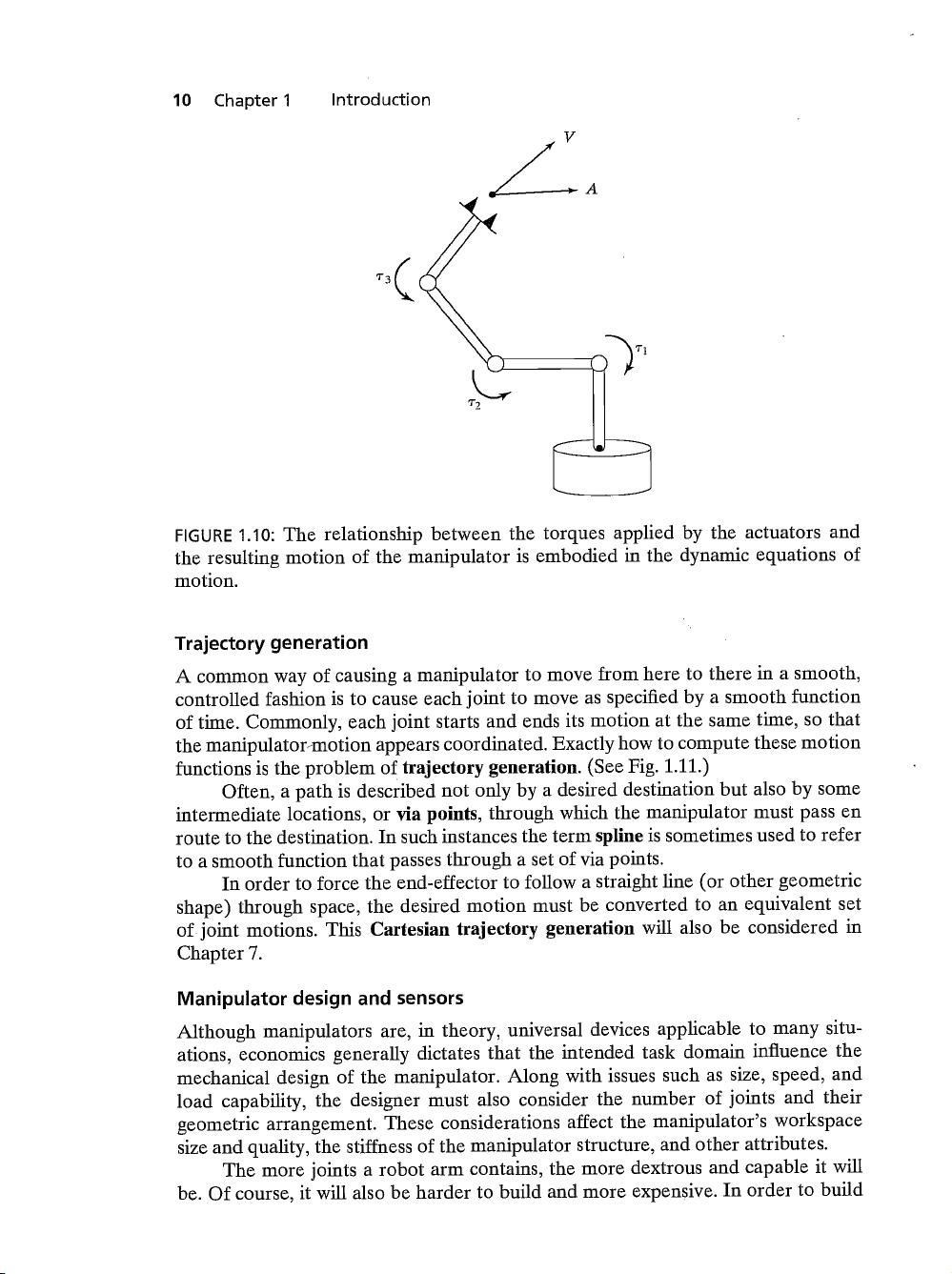
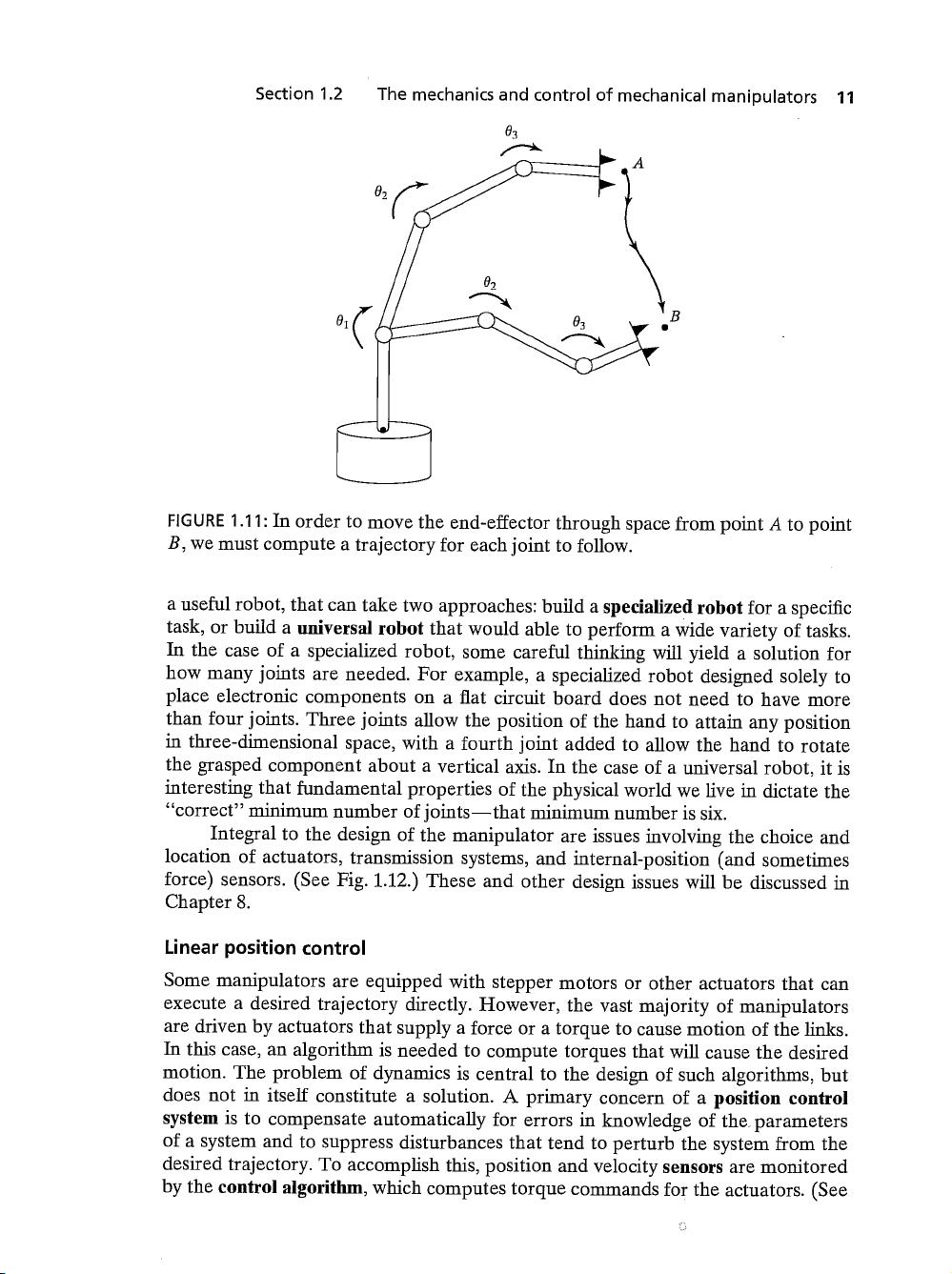
7. **轨迹生成**:研究如何规划机器人的平滑路径,避免碰撞和优化运动性能。
8. **操纵器机制设计**:讨论了机器人结构设计的原则,如连杆的布局、自由度的选择,以及如何平衡机械效率和灵活性。
9. **线性控制**:介绍了适用于操纵器的线性控制理论,如PID控制、状态反馈等,以及它们在实际机器人系统中的应用。
10. **非线性控制**:深入探讨非线性控制策略,如滑模控制和自适应控制,以应对机器人系统的非线性特性。
11. **力控制**:讲述如何实现对机器人执行器力和扭矩的精确控制,这对于精细操作和交互任务至关重要。
12. **机器人编程语言和系统**:涵盖了机器人操作系统(ROS)和其他编程框架,以及如何编写和执行机器人程序。
13. **离线编程系统**:讨论了机器人程序的离线生成,如基于计算机图形学的方法和仿真技术。
书后附录包括三角恒等式、角度设定约定和一些逆运动学公式,以及部分练习题的答案,为读者提供了进一步学习和自我检验的资源。
《机器人学导论》第三版是深入理解机器人技术的宝贵教材,适合工程学生、研究人员和专业工程师作为参考书籍。通过阅读本书,读者可以掌握机器人学的核心概念,从而能够设计、分析和控制各种机器人系统。
8 Chapter 1
Introduction
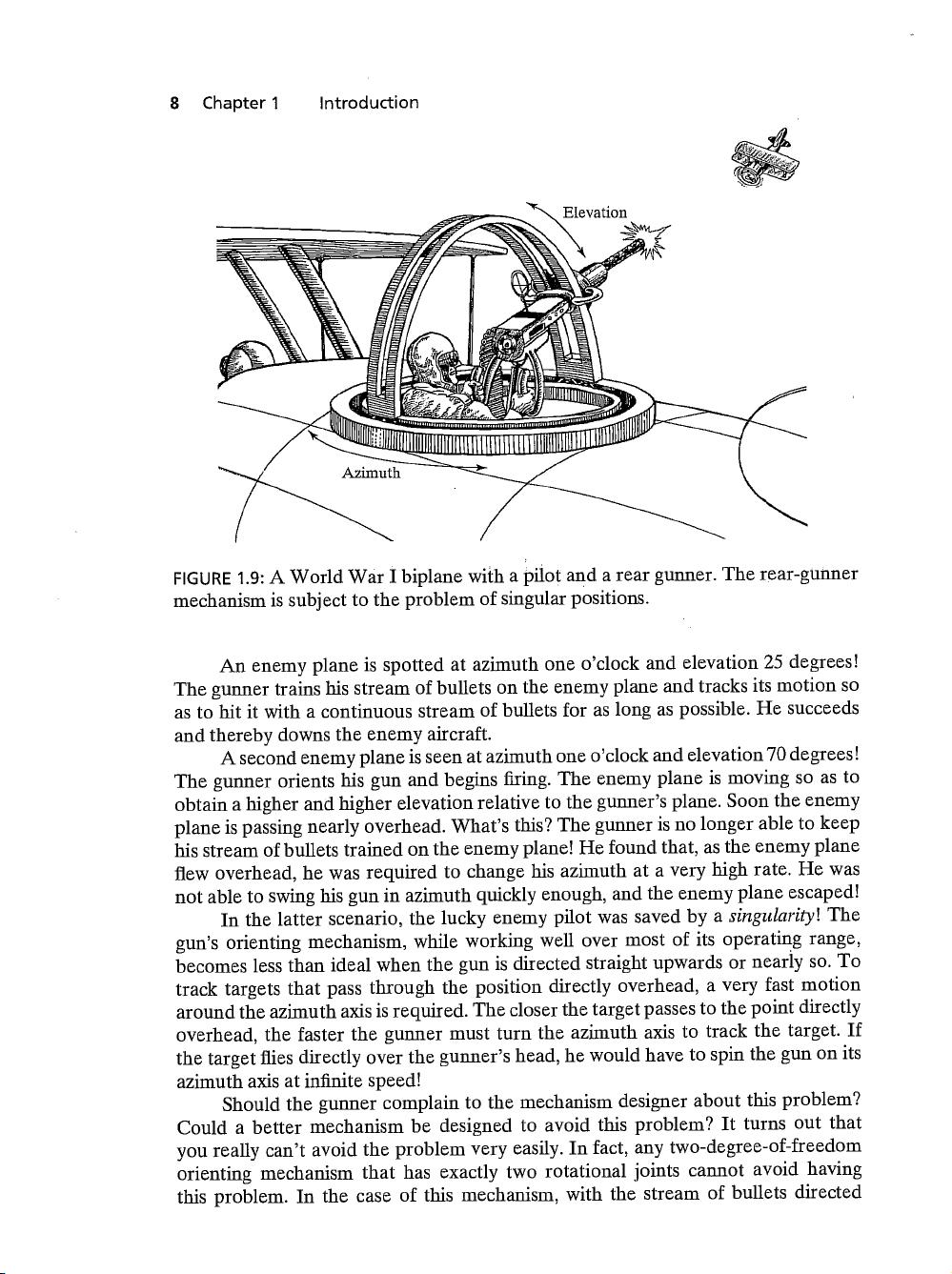
FIGURE 1
9 A
World
War I biplane with a pilot and a rear gunner The rear gunner
mechanism is subject to
the
problem of singular positions.
An
enemy plane is
spotted at azimuth one o'clock and elevation 25 degrees!
The gunner trains his stream of bullets on the enemy plane and tracks its motion so
as to hit it with a continuous stream of bullets for as long as
possible. He succeeds
and thereby downs the enemy aircraft.
A second enemy plane is seen at azimuth one o'clock and elevation 70 degrees!
The gunner orients his gun and begins firing. The enemy plane is moving so as to
obtain a higher and higher elevation relative to the gunner's plane. Soon the enemy
plane is passing nearly overhead. What's this? The gunner is no longer able to keep
his stream of bullets trained on the enemy plane! He found that, as the enemy plane
flew overhead, he was required to change his azimuth at a very high rate. He was
not able to swing his gun in azimuth quickly enough, and the enemy plane
escaped!
In the latter scenario, the lucky enemy pilot was saved by a singularity!
The
gun's orienting mechanism, while working well over most of its operating range,
becomes less than ideal when the gun is directed straight upwards or nearly so. To
track targets that pass through the position directly overhead, a very fast motion
around the azimuth axis is required. The closer the target passes to the point directly
overhead, the faster the gunner must turn the azimuth axis to track the target. If
the target flies directly over the gunner's head, he would have to spin the gun on
its
azimuth axis at infinite speed!
Should the gunner complain to the mechanism designer about this problem?
Could a better mechanism be designed to avoid this problem? It turns out that
you really can't avoid the problem very easily. In fact, any
two-degree-of-freedom
orienting mechanism that has exactly two rotational joints cannot avoid having
this problem. In the case of this mechanism, with the stream of bullets directed


剩余407页未读,继续阅读
6242 浏览量
点击了解资源详情
点击了解资源详情
161 浏览量
1190 浏览量
193 浏览量

Kelooo
- 粉丝: 1
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 常见网络命令使用!!!
- 用C#实现的电子商务的文档
- proteus7.1+keil8.08
- 《AVR单片机的GCC软件设计》.pdf
- PLC控制电冰箱的灯光大小
- 全国计算机等级考试四级数据库工程师教程 课后答案
- 单片机基础教程-入门级
- 基于索引的SQL语句优化之降龙十八掌
- 如何在局域网安装Redmine(原创)
- 计算机网络答案 谢希仁
- E:\ATA认证复习题\70-228SQL Server 2000企业版的安装、配置和管理模.pdf
- Flex 性能简评:Flex 和 JavaServer Pages 应用程序的比较
- linux下的调试工具-GDB
- 2009软件设计师考试大纲
- ExtJS 最新实用简明教程
- FAT32文件系统中文版
