FlexRay通信总线技术详解
需积分: 14 58 浏览量
更新于2024-09-11
收藏 480KB PDF 举报
"NI知道手册 - 一本关于FlexRay汽车通信总线的参考资料"
FlexRay是一种在汽车行业中广泛使用的高级通信协议,它具有确定性、容错性和高速度的特点,特别适合于对实时性能要求极高的“x-by-wire”应用,如drive-by-wire(线控驱动)、steer-by-wire(线控转向)和brake-by-wire(线控刹车)等。FlexRay通信总线的设计旨在满足汽车电子控制单元(ECU)之间通信速度、数据量和可靠性的不断提升需求。
1. 增加的通信需求
随着汽车安全、性能、环保和舒适性的提升,车辆内部ECU之间的数据通信速度和质量必须得到提高。复杂的控制系统和安全系统,涉及多个传感器、执行器和ECU的集成,对通信系统的性能提出了更高的要求。
2. FlexRay基础
FlexRay系统的核心是其强大的通信能力,它允许在多个通道上并行传输数据,以实现极低的延迟和高带宽。这种设计确保了即使在存在故障的情况下,也能保持系统的稳定运行。
3. FlexRay拓扑与布局
FlexRay网络可以采用星形、总线形或混合拓扑结构,这提供了灵活性,可以根据汽车的具体需求进行定制。布局考虑了信号的传播时间和信号质量,以确保在整个网络中的通信一致性。
4. FlexRay协议
FlexRay协议是其高效运行的基础,它包括调度、错误检测和恢复机制。协议允许预定义的时间槽用于特定任务,确保了通信的确定性。同时,它还包含了错误检测和纠正功能,增强了网络的容错能力。
5. FIBEX - FlexRay网络数据库
FIBEX(FlexRay接口和网络配置交换格式)是一个标准化的数据交换格式,用于描述FlexRay网络的结构和配置。它使得不同供应商的组件能无缝集成到同一网络中,促进了汽车电子系统的模块化和互操作性。
6. PCI和PXI FlexRay接口
PCI(外围组件互联)和PXI(基于PCI的嵌入式系统)接口是将FlexRay网络连接到测试和开发平台的标准方式。这些接口提供了高速数据传输,使得工程师能够有效地测试和调试FlexRay系统。
7. 结论
FlexRay通信技术是现代汽车电子系统的关键组成部分,它满足了对高性能、高可靠性和实时性的严格要求。随着汽车行业对智能化和自动化程度的不断提升,FlexRay的应用将继续扩展,推动汽车通信技术的进步。
FlexRay不仅是一项技术,更是一个解决汽车通信挑战的完整解决方案,对于理解现代汽车电子系统以及如何优化其性能至关重要。
1/6 www.ni.com
1.
2.
3.
4.
5.
6.
7.
FlexRay Automotive Communication Bus Overview
Publish Date: Aug 21, 2009 | 102 Ratings | out of 53.43
Overview
The FlexRay communications bus is a deterministic, fault-tolerant and high-speed bus system developed in conjunction with automobile manufacturers and leading suppliers. FlexRay delivers the
error tolerance and time-determinism performance requirements for x-by-wire applications (i.e. drive-by-wire, steer-by-wire, brake-by-wire, etc.). This article covers the basics FlexRay.
Table of Contents
Increasing Communications Demands
FlexRay Basics
FlexRay Topology and Layout
The FlexRay Protocol
FIBEX - The FlexRay network database
PCI and PXI FlexRay interfaces
Conclusion
1. Increasing Communications Demands
For automobiles to continue to improve safety, increase performance, reduce environmental impact, and enhance comfort, the speed, quantity and reliability of data
communicated between a car's electronic control units (ECU) must increase. Advanced control and safety systems--combining multiple sensors, actuators and electronic
control units--are beginning to require synchronization and performance past what the existing standard, Controller Area Network (CAN), can provide. Coupled with
growing bandwidth requirements with today's advanced vehicles utilize over five separate CAN busses, automotive engineers are demanding a next-generation,
embedded network. After years of partnership with OEMs, tool suppliers, and end users, the FlexRay standard has emerged as the in-vehicle communications bus to
meet these new challenges in the next generation of vehicles.
Adoption of a new networking standard in complex embedded designs like automobiles takes time. While FlexRay will be solving current high-end and future mainstream
in-vehicle network challenges, it will not displace the other two dominant in-vehicle standards, CAN, and LIN. In order to optimize cost and reduce transition challenges, the next generation of
automobiles will contain FlexRay for high-end applications, CAN for mainstream powertrain communications and LIN for low-cost body electronics.
Bus LIN CAN FlexRay
Speed 40 kbit/s 1 Mbit/s 10 Mbit/s
Cost $ $$ $$$
Wires 1 2 2 or 4
Typical Applications Body Electronics (Mirrors, Power Seats,
Accesories)
Powertrain (Engine, Transmission, ABS) High-Performance Powertrain, Safety
(Drive-by-wire, active suspension, adaptive
cruise control)
Understanding how FlexRay works is important to engineers across all aspects of the vehicle design and production process. This article will explain the core concepts of FlexRay.
2. FlexRay Basics
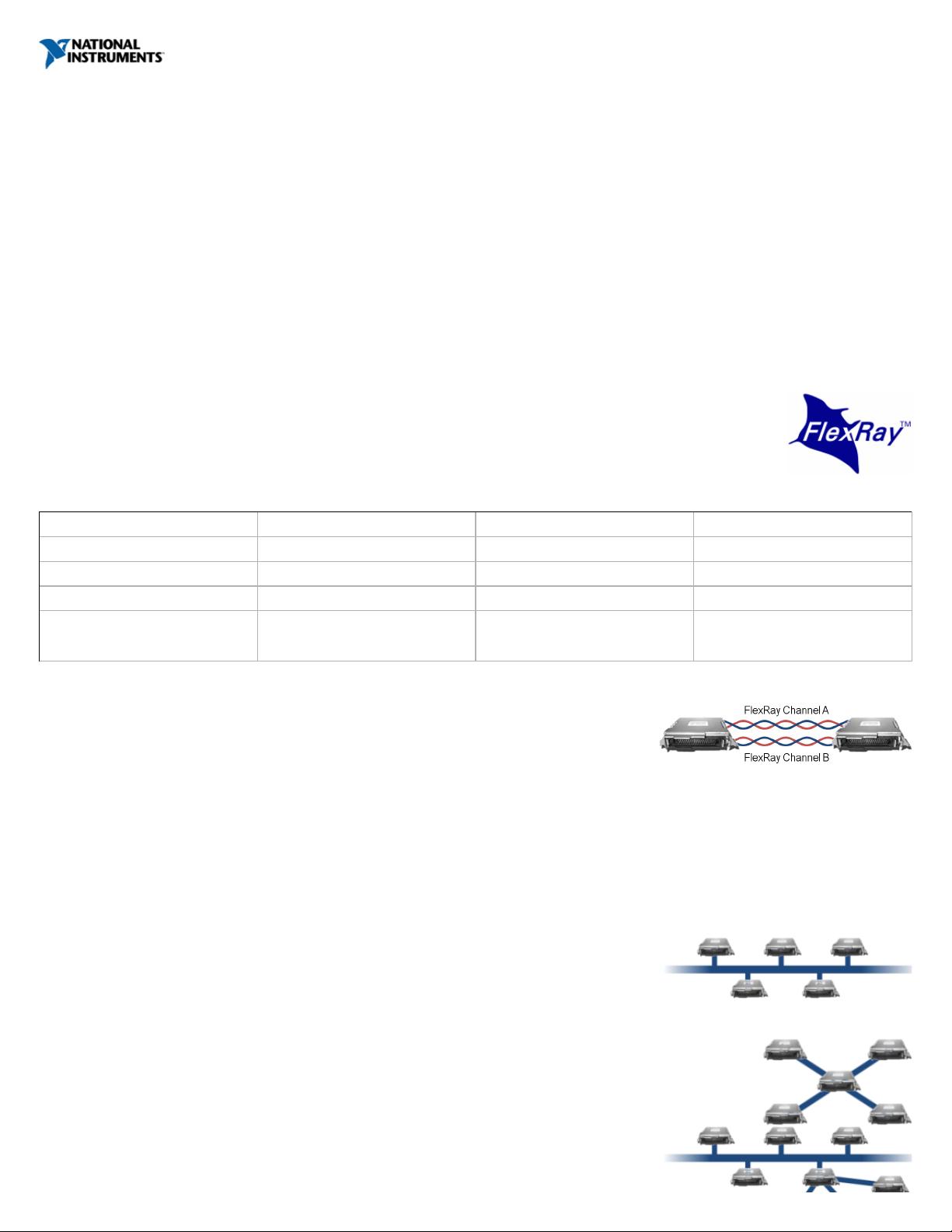
Many aspects of FlexRay are designed to keep costs down while delivering top performance in a rugged environment. FlexRay uses
cabling to connect nodes together. FlexRay supports single- and dual-channel configurations which consist of oneunshielded twisted pair
or two pairs of wires respectively. Differential signaling on each pair of wires reduces the effects of external noise on the network without
expensive shielding. Most FlexRay nodes typically also have power and ground wires available to power transceivers and microprocessors.
Dual-channel configurations offer enhanced fault-tolerance and/or increased bandwidth. Most first-generation FlexRay networks only utilize
one channel to keep wiring costs down, but as applications increase in complexity and safety requirements, future networks will use both
channels.
FlexRay buses require at the ends, in the form of a resistor connected between the pair of signal wires. Only the end nodes on a multi-drop bus need termination. Too much or too littletermination
termination can break a FlexRay network. While specific network implementations vary, typical FlexRay networks have a cabling impedance between 80 and 110 ohms, and the end nodes are
terminated to match this impedance. Termination is one of the most frequent causes of frustration when connecting a FlexRay node to a test setup. Modern PC-based FlexRay interfaces may contain
on-board termination resistors to simplify wiring.
3. FlexRay Topology and Layout
One of the things that distinguishes FlexRay, CAN and LIN from more traditional networks such as ethernet is its topology, or network layout. FlexRay supports simple multi-drop passive connections
as well as active star connections for more complex networks. Depending a vehicle's layout and level of FlexRay usage, selecting the right topology helps designers optimize cost, performance, and
reliability for a given design.
Multi-drop Bus
FlexRay is commonly used in a simple topology that features a single network cable run that connects multiple ECUsmulti-drop bus
together. This is the same topology used by CAN and LIN and is familiar to OEMs, making it a popular topology in first-generation FlexRay
vehicles. Each ECU can "branch" up to a small distance from the core "trunk" of the bus. The ends of the network have termination resistors
installed that eliminate problems with signal reflections. Because FlexRay operates at high frequencies, up to 10 Mbit/s compared to CAN's 1
Mbit, FlexRay designers much take care to correctly terminate and lay out networks to avoid signal integrity problems. The multi-drop format
also fits nicely with vehicle harnesses that commonly share a similar type of layout, simplifying installation and reducing wiring throughout the vehicle.
Star Network
The FlexRay standard supports "Star" configurations which consist of individual links that connect to a central active node. This node is functionally similar to a hub
found in PC ethernet networks. The active star configuration makes it possible to run FlexRay networks over longer distances or to segment the network in such a
way that makes it more reliable should a portion of the network fail. If one of the branches of the star is cut or shorted, the other legs continuing functioning. Since
long runs of wires tend to conduct more environmental noise such as electromagnetic emissions from large electric motors, using multiple legs reduces the amount
of exposed wire for a segment and can help increase noise immunity.
Hybrid Network
The bus and star topologies can be combined to form a topology. Future FlexRay networks will likely consist of hybrid networks tohybrid
take advantage of the ease-of-use and cost advantages of the bus topology while applying the performance and reliability of star networks
where needed in a vehicle.
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2016-04-11 上传
2010-09-01 上传
2018-06-02 上传
2022-04-18 上传

mzvictor31
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







