超螺旋滑模观测器提升永磁同步电机无速度传感器控制精度
131 浏览量
更新于2024-09-03
4
收藏 5.61MB PDF 举报
本文主要探讨了在永磁同步电机(PMSM)低速运行时,由于电机反电动势减小,采样通道非线性引起的直流偏置对电机反电动势观测造成的影响问题。针对这一挑战,研究者提出了一个创新的解决方案,即基于超螺旋滑模观测器的无速度传感器控制方法。
首先,文章介绍了超螺旋滑模观测器的设计。它借鉴了等效反馈的概念,旨在优化低速条件下无速度传感器的控制精度。这种新型观测器利用滑模控制理论,能够有效地估计电机的状态,即使在缺乏速度传感器的情况下,也能确保电机的精确控制。
其次,作者深入分析了直流偏置对无速度传感器控制性能的影响。由于电机运行中的直流偏置可能导致控制误差,因此设计了一种基于二阶广义积分器的直流偏置抑制策略。这个方法通过连续跟踪和补偿直流偏置,有效地减少了其对控制精度的负面影响。
最后,为了验证所提出的控制策略的有效性,研究团队在一个6.6 kW的永磁同步电机无速度传感器控制系统中进行了实际应用。实验结果表明,新的控制方法显著提高了电机在低速条件下的控制精度和稳定性,尤其是在没有传统速度传感器的情况下,证明了这种方法在实际应用中的可行性。
总结来说,这篇文章的核心贡献在于提出了一种结合超螺旋滑模观测器和二阶广义积分器的永磁同步电机无速度传感器控制策略,旨在提升电机在低速运行时的控制性能,对于减少环境因素对电机控制的影响以及降低风电和电动汽车系统中的成本有着重要的意义。同时,这项研究也为其他领域的电机控制提供了新的思路和技术支持。
第 2 期
郭磊磊,等:基于超螺旋滑模观测器的永磁同步电机无速度传感器控制方法
其 中 ,i
ˉ
α
=i
α
- i
α
;i
ˉ
β
=i
β
- i
β
;l
2
和 δ 为 待 设 计 的 反 馈
增益。
所设计的超螺旋滑模观测器的稳定性在附录 A
中进行了证明。在观测器收敛时,由附录 A 中式
(A7)即可得到观测的反电动势值。同时,由式(7)
还可知:
ì
í
î
ï
ï
S
αeq
=
∫
δS
α
dt
S
βeq
=
∫
δS
β
dt
(8)
由式(8)可见,虽然
S
α
、
S
β
含有大量的高频滑模
噪声,但由于积分运算具有消除高频信号的作用,观
测得到的等效反馈信号 S
αeq
、S
βeq
不含滑模噪声,因此
可根据附录 A 中式(A7)进一步观测得到反电动势
值,而不需要再增加额外的低通滤波器,从而避免了
相位延时的出现。同时,由附录 A 中式(A7)可见,
在电机低速运行时,即使反电动势较小,也可以通过
选择一个大于 0 且小于 1 的 l
2
来使等效反馈信号增
大,从而有助于提高低速时的转子位置和转速估计
精度
[20⁃22]
。
考虑到在电机转速较低时,需要设计较小的 l
2
来增大等效反馈信号,而在电机转速较高时则不需
要增大等效反馈信号,因此,本文按式(9)对 l
2
进行
在线自适应调整。
l
2
=
ω
r
ω
rN
(9)
其中,
ω
rN
为永磁同步电机的额定转速;
ω
r
为估计的
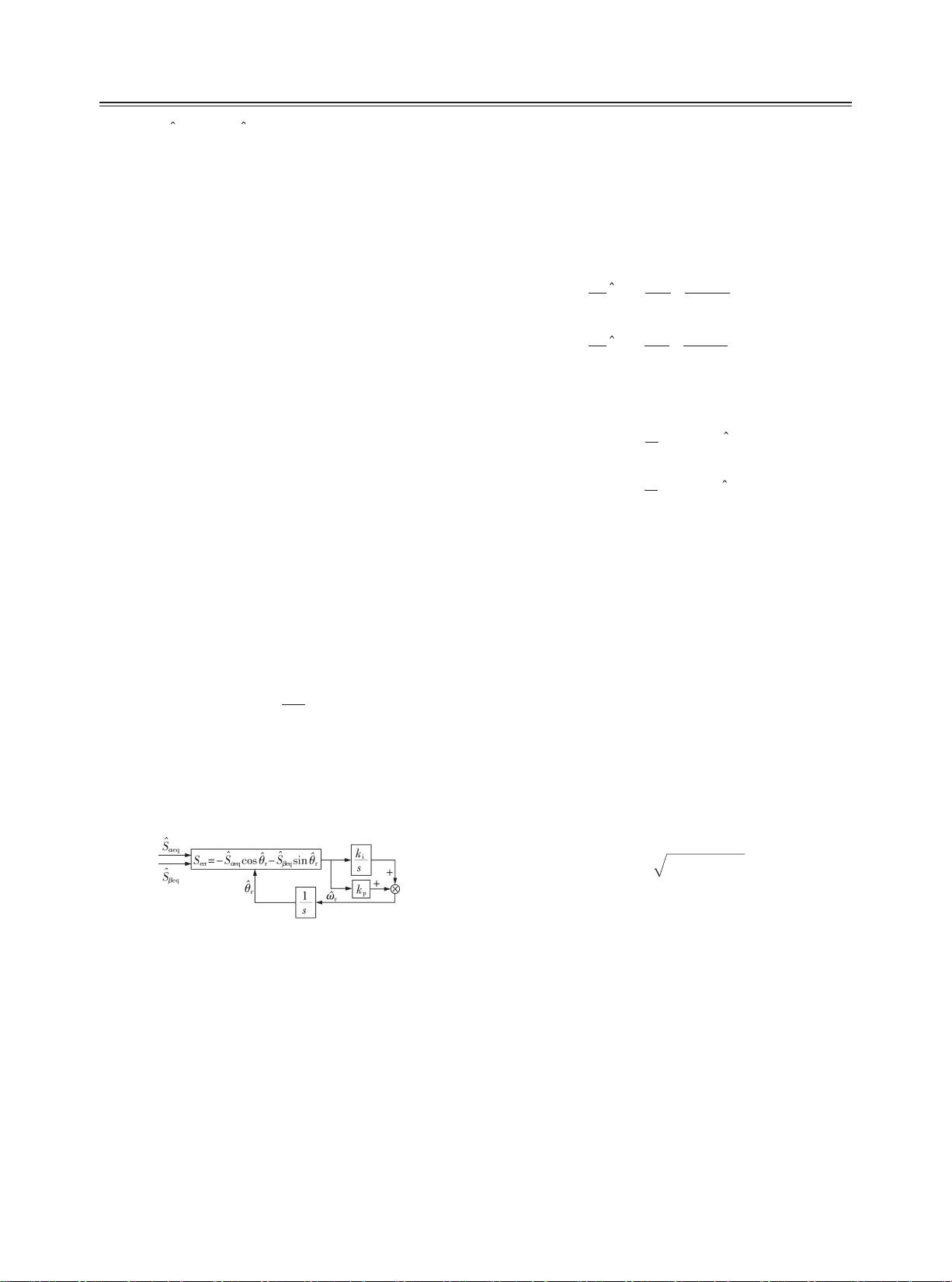
同步转速,可通过图 1 所示的锁相环得到。图 1 中,
θ
r
为估计的转子位置角度;k
i
为 PI 调节器的积分系
数;k
p
为 PI调节器的比例系数。
由式(2)、式(9)和附录 A 中式(A7)可得,当滑
模观测器收敛时,S
αeq
、S
βeq
满足:
ì
í
î
ï
ï
S
αeq
=-ω
rN
ψ
f
sin θ
r
S
βeq
=ω
rN
ψ
f
cos θ
r
(10)
由此可见,当采用式(9)对 l
2
进行在线自适应调
整时,在电机转速变化时,观测的等效反馈信号幅值
可以保持不变,因此,即使在电机低速运行时,本文
所设计的方法依然可以获得较好的无速度传感器控
制效果。
3 直流偏置影响分析与抑制
3.1 直流偏置影响分析
由式(7)可见,所建立的滑模观测器需要已知电
机的电压和电流等信息,而在电压、电流采样过程中
很容易引入直流偏置。当仅考虑直流偏置时,由式
(7)可得:
ì
í
î
ï
ï
ï
ï
ï
ï
ï
ï
0=-
R
s
L
s
i
αdc
+
u
αdc
L
s
-
l
2
S
αeqdc
L
s
-
||
i
ˉ
α
0.5
S
α
0=-
R
s
L
s
i
βdc
+
u
βdc
L
s
-
l
2
S
βeqdc
L
s
-
||
i
ˉ
β
0.5
S
β
(11)
其中,下标“dc”表示相应变量的直流分量。
在滑模观测器收敛时,
i
ˉ
α
=i
ˉ
β
=0
,由式(11)可得:
ì
í
î
ï
ï
ï
ï
S
αeqdc
=
1
l
2
(u
αdc
- R
s
i
αdc
)
S
βeqdc
=
1
l
2
(u
βdc
- R
s
i
βdc
)
(12)
由此可见,采样电压和电流中含有的直流信号
必然会导致估计的等效反馈和反电动势含有直流分
量,进而会降低转速和角度的观测精度。
根据图 1 所示的锁相环原理
[19]
,可构造误差变
量 S
err
,满足:
S
err
=-S
αeq
cos θ
r
- S
βeq
sin θ
r
(13)
当不考虑直流偏置时,S
err
可表示为:
S
err
= ω
rN
ψ
f
sin(θ
r
- θ
r
) (14)
当估计角度误差较小时,可认为 S
err
与角度偏差
成正比,因此可采用 PI 控制器进行闭环调节,从而
实现角度和速度的估计,如图 1所示。
然而,当考虑直流偏置影响时,式(13)则表示为:
S
err
= -(S
αeq
+ S
αeqdc
)cos θ
r
- (S
βeq
+ S
βeqdc
)sin θ
r
(15)
由(15)进一步可得:
S
err
= ω
rN
ψ
f
sin(θ
r
- θ
r
)- S
2
αeqdc
+ S
2
βeqdc
sin(φ + θ
r
)(16)
其中,φ = arctan(S
αeqdc
/S
βeqdc
)。
由式(16)可见,当含有直流偏置时,S
err
将含有
一个基频分量,经过 PI 调节器之后,这会导致估计
的速度和角度均含有一个基频分量。在进行无速度
传感器控制时,这个基频分量会导致电机的转速出
现一定的振荡,甚至导致系统不能稳定运行。因此,
必须消除估计的转子位置和转速中所含的基频波动
分量。
3.2 直流偏置抑制方法
由前文可知,为了改善滑模观测器低速的转子
位置和转速观测效果,需要设计 l
2
在 0 和 1 之间,由
式(12)可知,直流偏置也会被放大。文献[20⁃22]所
设计的方法也存在同样的问题,因此,必须对直流偏
置进行抑制。
图 1 锁相环
Fig.1 Phase-locked loop
剩余11页未读,继续阅读
181 浏览量
2025-01-25 上传
2025-01-20 上传
180 浏览量
633 浏览量
363 浏览量

weixin_38741030
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入探讨V2C控制Buck变换器稳定性分析及仿真验证
- 2012款途观怡利导航破解方法及多图功能实现
- Vue.js图表库vuetrend:简洁优雅的动态数据展示
- 提升效率:仓库管理系统中的算法与数据结构设计
- Matlab入门必读教程——快速上手指南
- NARRA项目可视化工具集 - JavaScript框架解析
- 小蜜蜂天气预报查询系统:PHP源码与前端后端应用
- JVM运行机制深入解析教程
- MATLAB分子结构绘制源代码免费分享
- 掌握MySQL 5:《权威指南》第三版中文版
- Swift框架:QtC++打造的易用Web服务器解决方案
- 实现对话框控件自适应的多种效果
- 白镇奇士推出DBF转EXCEL高效工具:hap-dbf2xls-hyy
- 构建简易TCP路由器的代码开发指南
- ElasticSearch架构与应用实战教程
- MyBatis自动生成MySQL映射文件教程
