
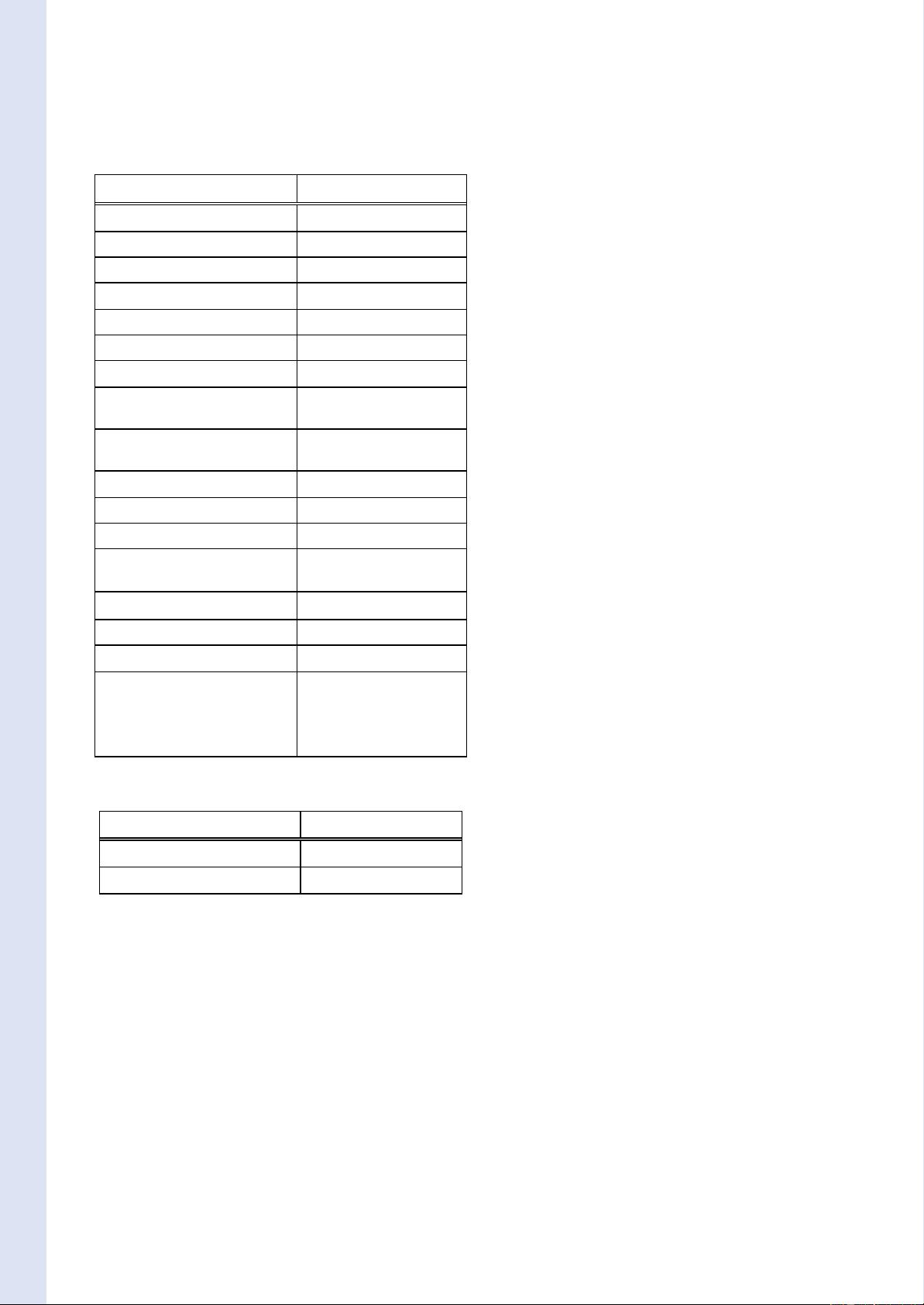
Table 1. Challenges and MOG Versions
Critical Situations References
Noise Image (NI) [61 -64]
Camera jitter (CJ) [58, 62, 65, 66]
Camera Adjustements (CA)
Auto Gain Control [67]
Auto White Balance [68]
Automatic Exposure Correction [69]
Gradual Illumination Changes (TD) [1, 24, 38, 63, 70-73, 74, 75]
Sudden Illumination Changes (LS) [24, 61, 63, 65, 67, 68, 70, 71,
74-81]
Bootstrapping during initialization
(B)
[59, 82, 83]
Bootstrapping during running (B) [84 -88]
Camouflage (C) [42, 72, 73, 88-92]
Foreground Aperture (FA) [93]
Moved background objects (MBO) [60, 63, 70, 74, 75, 80 ,85, 87,
88]
Inserted background objects (IBO) [60, 63, 70, 74, 75, 85, 87, 88]
Multimodal background (MB) [1, 61, 64, 84, 86, 90, 94-107]
Waking foreground object (WFO) [74 -75, 80, 85, 87, 88]
Sleeping foreground objects (SFO) [1, 42, 60,74,75,78,79, 85, 87,
88, 108-114]
Shadows and highlights (S) [61, 62, 68-70, 81, 101, 109,
115-123]
Table 2. Real Time Constraints and MOG Versions
Real-Time Constraints References
Computation Time (CT) [24, 43, 92,124-131]
Memory Requirement (MR) [127, 128]
time. To solve this problem, Zivkovic [94] proposes an
online algorithm that estimates the parameters of the MOG
and simultaneously selects the number of Gaussians using
the Dirichlet prior. The consequence is that K is dynamically
adapted to the multimodality of each pixel. In the same idea,
Cheng et al. [95] propose a stochastic approximation
procedure which is used to recursively estimate the
parameters of MOG and obtains the asymptotically optimal
number of Gaussians. Another approach proposed by
Shimada et al. [96] consists in a dynamic control of the
number of Gaussians. This approach automatically changes
the number of Gaussians in each pixel. The number of
Gaussians increases when pixel values often change. On the
other hand, when pixel values are constant in a while, some
Gaussians are eliminated or integrated. Another idea
proposed by Tan et al. [97] consists in a modified online EM
procedure to construct an adaptive MOG in which the
number K can adaptively reflect the complexity of pattern at
the pixel. Carminati et al. [98] estimate the optimal number
of K Gaussians for each pixel in a training set using an
ISODATA algorithm. This method is less adaptive than the
others because K isn’t updated after the training period.
3.2. Initialization of the Weight, the Mean and the
Variance
Stauffer and Grimson [1] initialized the weight, the mean
and the variance of each Gaussian using a K-means
algorithm. A training sequence without foreground is
needed. This initialization scheme is improved as follows:
By using another algorithm for the initialization:
Pavlidis et al. [99] show that an EM algorithm [51] is a
superior initialization method that provides fast learning and
exceptional stability to the foreground detection. This is
especially true when initialization happens during challen-
ging weather conditions like fast moving clouds or other
cases of multimodal background (MB). The disadvantage is
that the EM algorithm is computationally intensive. In the
continuity, Lee [84] proposes an approximation of the EM
algorithm to avoid unnecessary computation or storage. His
results on both synthetic data and surveillance videos show
better learning efficiency and robustness in case of (B) and
(MB) than the algorithm used by Friedman and Russel [50],
Stauffer and Grimson [1], and Bowden et al. [132].
By allowing presence of foreground objects in the
training sequence: Following the assumption that the
background’s pixels appear in the image sequence with the
maximum frequency, Zhang et al. [60] propose a
background reconstruction algorithm to initialize the MOG
even in presence of foreground in the scene. Another
approach proposed by Amintoosi et al. [82] consists in a QR-
decomposition based algorithm. To be more robust when
large parts of the background are occluded by moving
objects and parts of the background are never seen, Lepisk
[83] proposes to use the optic flow to reason about if the
background has been seen or not. This method is more robust
in the case of bootstrapping (B).
3.3. Maintenance of the Weight, the Mean and the
Variance
Stauffer and Grimson [1] updated the weight, the mean
and the variance of each Gaussians with an IIR filter using a
constant learning rate
α
for the weight update and a
learning rate
ρ
for the mean and variance update. This
maintenance scheme is optimized in the literature through
three different ways:
(1) Maintenance Rules: The update of the parameters in
Stauffer and Grimson [1] is made using an IIR filter like
shown in the Equation (6). The disadvantage is that it is
necessary to choose using a training sequence the learning
rate
α
which is then fixed for all the sequence. To improve
the robustness and sensitively to gradual illumination chan-
ges (TD), Han and Lin [38] update the MOG via adaptive
Kalman filtering. The main interest is that the Kalman filter
proposed adjusts its gain depending on the normalized
hal-00338206, version 1 - 12 Nov 2008
剩余18页未读,继续阅读

u010701520
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建Cadence PSpice仿真模型库教程
- VMware 10.0安装指南:步骤详解与网络、文件共享解决方案
- 中国互联网20周年必读:影响行业的100本经典书籍
- SQL Server 2000 Analysis Services的经典MDX查询示例
- VC6.0 MFC操作Excel教程:亲测Win7下的应用与保存技巧
- 使用Python NetworkX处理网络图
- 科技驱动:计算机控制技术的革新与应用
- MF-1型机器人硬件与robobasic编程详解
- ADC性能指标解析:超越位数、SNR和谐波
- 通用示波器改造为逻辑分析仪:0-1字符显示与电路设计
- C++实现TCP控制台客户端
- SOA架构下ESB在卷烟厂的信息整合与决策支持
- 三维人脸识别:技术进展与应用解析
- 单张人脸图像的眼镜边框自动去除方法
- C语言绘制图形:余弦曲线与正弦函数示例
- Matlab 文件操作入门:fopen、fclose、fprintf、fscanf 等函数使用详解
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


