
现将太阳能转换为电能的装置。
3、该系统能适应不同的环境。
4、具备自我保护功能。
5、能够接受自动完成转换。
6、其他附加功能。
二 系统设计
2.1 系统整体设计
本系统主要由中央处理单元、智能采光、电源管理和上位机软件4 个部分组成。系统主要
实现利用率的提高,太阳能的转换和存储。本设计还提供了对系统的检测和管理。
如图 1 所示,系统包括控制处理单元、电源管理单元、供电和输电单元(包括太阳能电池
板、蓄电池、市电、电能输出接口)、接口单元、显示单元、按键、指示和报警单元、步进电
机驱动单元和采光单元。控制系统硬件选用 AtmeL 公司的 At89C51(与 Intel 公司 MCS-51 系列
兼容)作为控制核心来控制机构的执行部件——步进电动机。完成了单片机外围硬件电路的设
计和相应的软件的设计。系统驱动器采用了与步进电机配套的专用集成模块,具有强抗干扰
性、高频性能好、结构简单、运行平稳等特点。电源管理单元与供电和输电单元实现蓄电池
充/供电切换、市电供电和蓄电池供电切换、太阳能充/供电切换、电能变换输出。
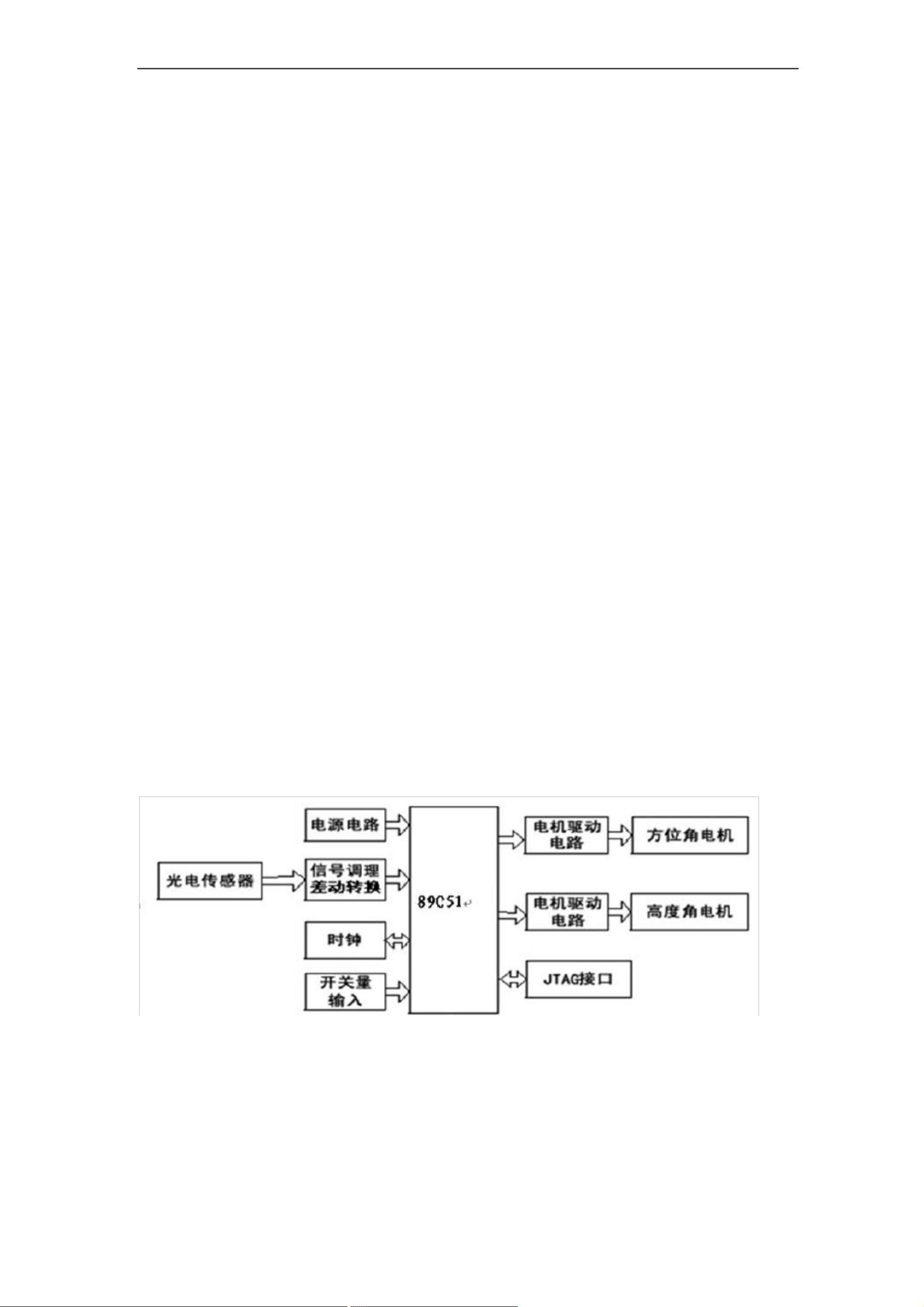
2.2 驱动控制器硬件总体设计方案
硬件总体方案如图 1。太阳跟踪与驱动控制器以单片机 89C51 为核心建立应用系统。光电
传感器输出的误差信号经过调理输入到差动转换电路,为跟踪提供依据。外部时钟为系统提供
准确的时间,以便阴天采用定时跟踪。当跟踪装置转到极限位置时,为了保护设备同时为第
二天跟踪做好准备和避免电缆缠绕,需返回初始位置。可以采用限位开关来复位,当机械设
备转到极限位置时,限位开关向单片机系统发送个脉冲,单片机响应此操作,进行中断处理,
跟踪装置归位。
图 1
三、设计原理与模块实现
3.1 智能采光的设计
剩余15页未读,继续阅读















