ADAMS与Matlab联合仿真教程:从设置到控制模型构建
需积分: 5 162 浏览量
更新于2024-08-03
1
收藏 94KB DOC 举报
"ADAMS与Matlab联合仿真是将机械系统动力学软件ADAMS(AnyBody Dynamic Analysis Modeler)与数学计算及仿真环境Matlab相结合,实现控制系统设计与机械系统动力学的联合仿真。这种仿真方式能有效地进行复杂的动态分析和控制策略优化。"
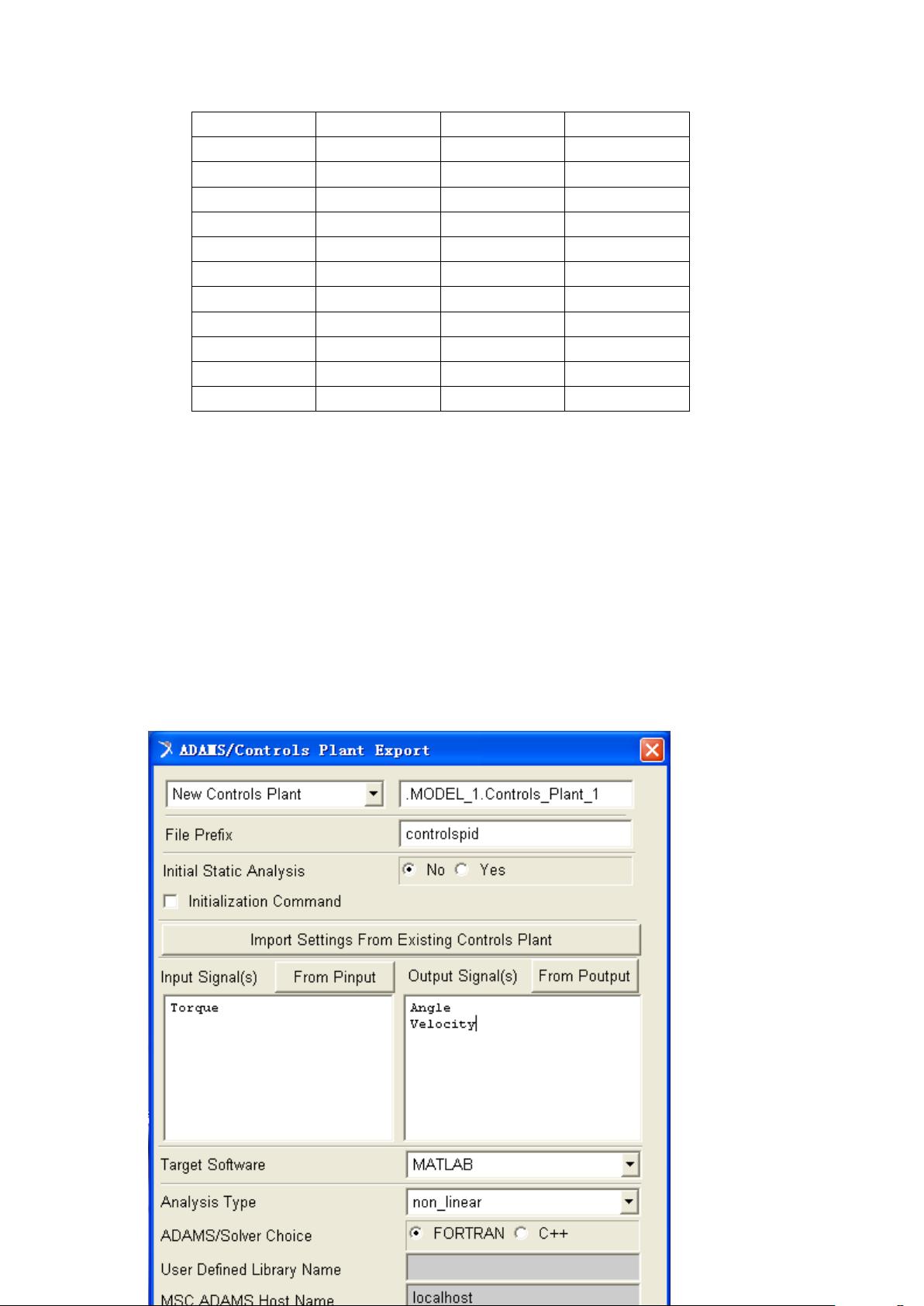
在ADAMS中,首先需要确保已安装并加载ADAMS/Controls模块,这是进行控制设计的关键。如果未加载,可以通过菜单【Tools】→【Plugin Manager】来添加。在插件管理对话框中选择ADAMS/Controls模块,点击OK,新增的Controls菜单会提供控制相关的功能。通过【Controls】→【Plant Export】,可以导出控制参数,设置如图7-33所示的各项,例如输入控制文件前缀、输入和输出变量,以及选择MATLAB作为控制包,设定非线性类型,并关闭初始静态分析,选择Fortran作为ADAMS求解器。
导出后,ADAMS工作目录下将生成三个文件:controlspid.m、controlspid.cmd和controlspid.adm,这些文件是连接ADAMS和MATLAB的关键。
接下来,需要在MATLAB环境中进行操作。启动MATLAB,并将工作目录设置为ADAMS的工作目录,这样MATLAB可以访问到ADAMS生成的文件。在MATLAB命令窗口中,运行controlspid.m文件,并使用ADAMS_sys命令建立ADAMS与MATLAB之间的接口。此时,MATLAB会打开一个Simulink选择窗口,S-Function代表ADAMS的非线性模型,而State-Space则表示线性化模型,ADAMS_sub包含非线性方程和相关变量。
在建立控制方案时,可以创建新的Simulink模型。通过【File】→【New】→【Model】新建模型窗口,然后保存模型。在Simulink环境中,可以根据具体控制需求,利用提供的各种模块(如PID控制器、滤波器等)构建控制结构。连接ADAMS的非线性模型(S-Function)和控制模块,设置必要的输入和输出,完成控制系统的建模。
联合仿真允许在MATLAB中设计和调试控制器,同时利用ADAMS的强大动力学模拟能力。当控制器设计完成后,可以通过ADAMS/Simulink接口将控制信号反馈给ADAMS模型,从而进行闭环动态仿真。这种方式大大提高了仿真效率和精度,尤其适用于处理非线性、多体动力学问题的复杂系统。通过不断的迭代和优化,可以得到满足性能要求的控制策略。
如果还没有加载 ADAMS/Controls 模块,单击菜单【Tools】→【Plugin Manager】,在弹出的
插件管理对话框中选择 ADAMS/Controls 模块,并单击 OK 按钮,之后出现一个新的菜单
Controls。单击菜单【Controls】→【Plant Export】,弹出导出控制参数对话框,如图 7-33 所示。
在 File Prefix 输 入 框 中 输 入 controlspid , 在 Plant Input 输 入 框 中 用鼠 标右 键快 捷菜 单输 入
PINPUT_Torque,在 Plant Output 输入框中用鼠标右键快捷菜单输入.PINPUT_output,将 Control
package 选择为 MATLAB,Type 选择为 non_linear,Initial Static Analysis 选择 NO,ADAMS/Solver
Choice 选 择为 Fortran 。单 击 OK 按 钮 后, 在 ADAMS 的 工作 目录 下 将生 成 controlspid.m 、
controlspid.cmd、controlspid.adm 这 3 个文件。
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-01-08 上传
2022-07-07 上传
2022-07-04 上传
2024-01-08 上传
2022-11-21 上传
2022-07-04 上传

ohmygodvv
- 粉丝: 507
- 资源: 4811
 我的内容管理
展开
我的内容管理
展开







最新资源
- Cucumber-JVM模板项目快速入门教程
- ECharts打造公司组织架构可视化展示
- DC Water Alerts 数据开放平台介绍
- 图形化编程打造智能家居控制系统
- 个人网站构建:使用CSS实现风格化布局
- 使用CANBUS控制LED灯柱颜色的Matlab代码实现
- ACTCMS管理系统安装与更新教程
- 快速查看IP地址及地理位置信息的View My IP插件
- Pandas库助力数据分析与编程效率提升
- Python实现k均值聚类音乐数据可视化分析
- formdotcom打造高效网络表单解决方案
- 仿京东套餐购买列表源码DYCPackage解析
- 开源管理工具orgParty:面向PartySur的多功能应用程序
- Flutter时间跟踪应用Time_tracker入门教程
- AngularJS实现自定义滑动项目及动作指南
- 掌握C++编译时打印:compile-time-printer的使用与原理
