CAN总线详解:工作原理与显隐性理解
CAN总线呕心沥血教程
CAN总线是一种广泛应用于汽车电子、工业控制和物联网领域的通信标准,其工作原理注重数据的高效、可靠传输。本文主要介绍了CAN总线的基础概念和核心工作机制。
CAN总线的工作原理基于一种广播式的设计,每个节点都监听并处理来自其他节点的数据,通过报文形式进行通信。报文的前11位是标识符,用于定义优先级,确保同一系统中不会有冲突的报文发送。当多个节点竞争总线使用权时,这种优先级机制至关重要。
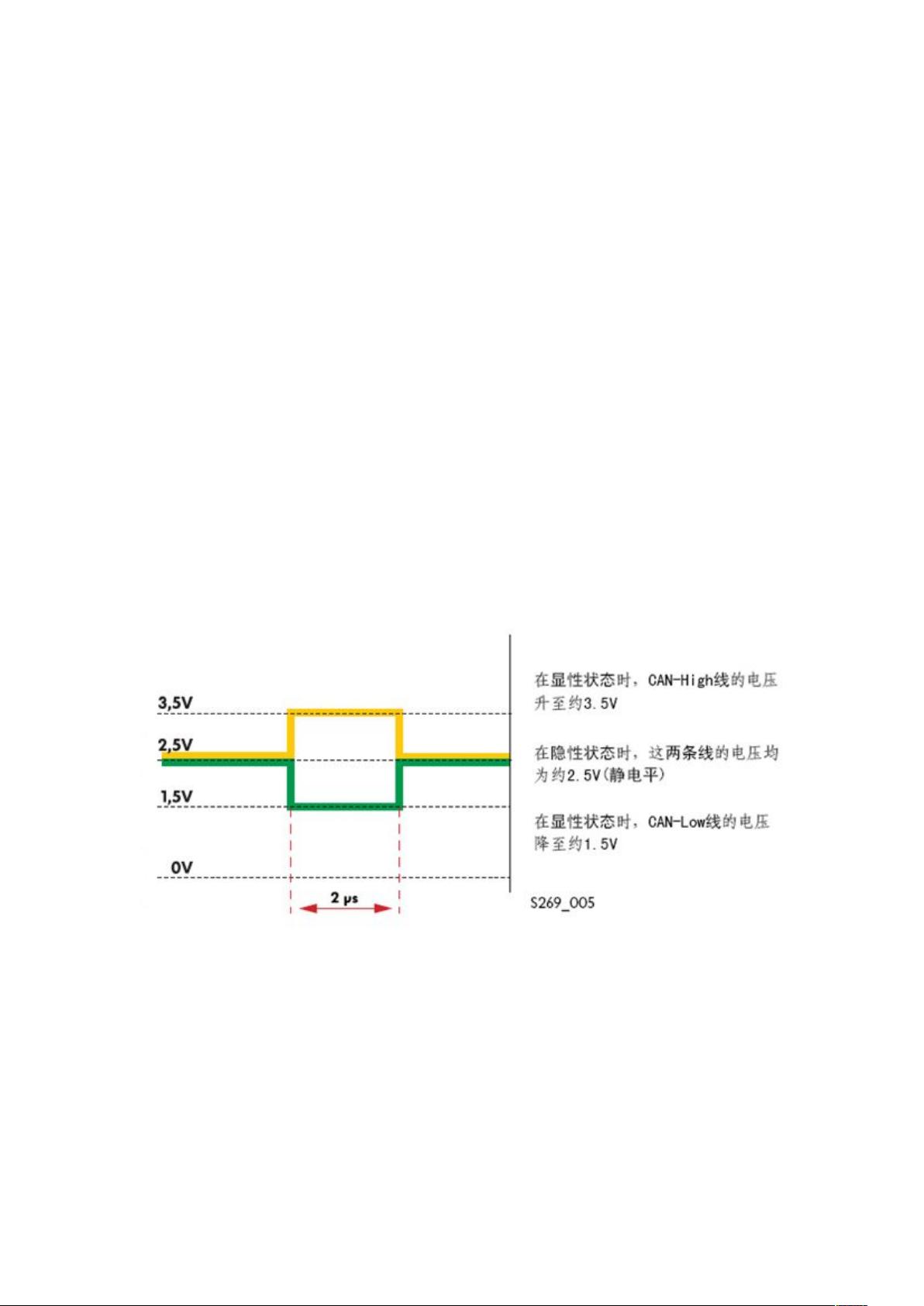
CAN数据总线由CAN_High和CAN_Low两条线组成,正常状态下保持约2.5伏的静电平,即隐性状态。当有信号传输时,CAN_High线电压升高至少1V,而CAN_Low线下降同样数值,形成明显的电压差,代表显性状态,用于数据的编码和解码。
CAN报文的传输依赖于电压差来表示逻辑1(隐性)和0(显性),通过收发器内的差动信号放大器,将接收到的信号进行放大,确保数据的准确接收。控制单元通过收发器与CAN总线相连,负责发送和接收信息。
理解CAN报文的构成包括帧、场和位的定义,帧是基本的数据单位,包含起始符、同步段、仲裁段、数据段和CRC校验等部分。这些部分共同保证了数据的完整性和准确性。
难点在于,为了保证通信安全,CAN报文需要进行错误检测和校正,比如使用循环冗余校验(CRC)来检测数据传输过程中可能出现的错误。此外,CAN总线还有不同的速度等级,如CAN-Lite简化了功能,适用于低数据速率应用,而CAN 2.0A和CAN 2.0B支持更高的数据速率。
学习CAN总线不仅需要掌握其工作原理,还需理解报文结构和错误检测机制,这对于设计和维护基于CAN的系统至关重要。通过本文提供的详细解释,读者可以更好地理解和应用CAN总线技术。
哥很郁闷,为了 CAN 研究了不少,看了不少资料,现在我给大家总结一下
先看看工作原理
当 CAN 总线上的一个节点(站)发送数据时,它以报文的形式广播给网络中所
有节点,对每个节点来说,无论数据是否是发给自己的,都对其接收。每组报
文开头的 11 位字符为标识符,定义了报文的优先级,这种报文格式成为面向内
容的编制方案。同一系统中标识符是唯一的,不可能有两个站发送具有相同标
识符的报文,当几个站同时竞争总线读取时,这种配置十分重要。
大体的工作原理我们搞清了,但是根本的协议我们还要花一番功夫。下面介
绍一个重要的名词,“显性“和”隐性“
在我看到的很多文章里,有很多显性和隐性的地方,为此我头痛不已,最终
我把它们彻底弄明白了。
首先 CAN 数据总线有两条导线,一条是黄色的,一条是绿色的。分别是
CAN_High 线和 CAN_Low 线
当静止状态时,这两条导线上的电平一样。这个电平称为静电平。大约为 2.5
伏。
这个静电平状态就是隐形状态,也称隐性电平。也就是没有任何干扰的时候的
状态称为隐性状态.当有信号修改时,CAN_High 线上的电压值变高了,一般来
说会升高至少 1V,而 CAN_Low 线上的电压值会降低一个同样值,也是 1v,那
么这时候。CAN_High 就 是 2.5v+1v=3.5v,它就处于激活状态了。而 CAN_Low
降为 2.5v-1v=1.5v。
可以看看这个图
由此我们得到
在隐性状态下,CAN_High 线与 CAN_Low 没有电压差,这样我们看到没有任
何变化也就检测不到信号。但是在显性状态时,改值最低为 2V,我们就可以利
用这种变化才传输数据了。所以出现了那些帧,那些帧中的场,那些场中的位,
云云~~~~~~~~~~~
在总线上通常逻辑 1 表示隐性。而 0 表示显性。这些 1 啊,0 啊,就可以利用起
来为我们传数据了。
利用这种电压差,我们可以接收信号。
一般来说,控制单元通过收发器连接到 CAN 驱动总线上,这个收发器(顾名思
义,可发送,可接收)内有一个接收器,该接收器是安装在接收一侧的差动信
下载后可阅读完整内容,剩余6页未读,立即下载
281 浏览量
319 浏览量
点击了解资源详情
205 浏览量
713 浏览量
281 浏览量
294 浏览量
238 浏览量

匡帮主
- 粉丝: 48
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- c程序,脑电数据处理,包括预处理,能量特征提取,fisher分类
- leetcode-solutions:流行的Leetcode问题的解决方案和学习资源
- 2013年述职述廉述学报告
- Auto Form Filler-crx插件
- 包文件结构
- 钉钉 For Mac_v5.0.11.0
- 电信设备-具备利用多个通信线路的DNC运转功能的数值控制装置.zip
- Java版QQ签到源码-dgc-gateway:dgc网关的存储库
- nodejs-course
- 银行员工年度考核总结
- C#中picturebox的图像拼接
- SwapSpace:一款类似58同城的app
- matlab的slam代码-ICIEA2018_IEKF_LeastSquare_Comparison:这是我论文中模拟的Matlab代码:基
- 中国茶文化主题网站模板
- goretube.github.io
- djembedb-react
