Dialog DA14681: 低功耗蓝牙Smart 4.2 SoC 数据手册
需积分: 10 61 浏览量
更新于2024-07-16
收藏 823KB PDF 举报
"DA14681_DS_v1.2.pdf"
Dialog Semiconductor的DA14681是一款专为低功耗蓝牙Smart 4.2设计的系统级芯片(SoC),它集成了多种功能模块,包括应用处理器、内存、加密引擎、电源管理单元、数字与模拟外设以及蓝牙智能MAC引擎和无线收发器。这款芯片基于ARM Cortex-M0 CPU,性能强大,最高可提供84 DMIPS(Dhrystone百万指令每秒)的处理能力,并且支持灵活的内存架构。
DA14681具有内置的RAM和ROM,以及非易失性存储(如OTP或外部Quad-SPI闪存),这使得代码可以从嵌入式内存执行,提供了极大的灵活性。该芯片的高级电源管理单元使其能够适应各种电池类型,包括主电池和次电池,同时还能为外部设备供电。此外,DA14681还内置了充电器和荷电状态(SOC)燃料计,能够直接通过USB对可充电电池进行充电。
在硬件层面,DA14681搭载了一个片上锁相环(PLL),允许系统时钟在32kHz到96MHz之间动态调整,以满足不同处理需求。为了节省功耗,芯片提供了多级优化的睡眠模式,在无活动时降低功率消耗。
主要特性包括:
1. 遵循蓝牙v4.2规范,确保了与最新蓝牙标准的兼容性。
2. ARM Cortex-M0 CPU核心,高性能且功耗低。
3. 灵活的内存配置,支持内部和外部存储器。
4. 强大的电源管理,适应各种电池供电场景。
5. 内置充电器和电池状态监测功能。
6. 可变时钟频率的PLL,兼顾性能与节能。
7. 多种低功耗睡眠模式,有效延长电池寿命。
DA14681这款SoC适用于需要低功耗蓝牙连接的各种应用场景,例如穿戴设备、健康监护器、智能家居设备、运动追踪器等。其强大的功能集和高效能设计使得它成为开发此类产品的理想选择。结合Dialog Semiconductor提供的详细数据手册(datasheet)V1.2版,开发者可以深入了解如何充分利用DA14681的各项特性,进行高效且节能的产品设计。
DA14681 Low Power Bluetooth Smart 4.2 SoC
© 2015 Dialog Semiconductor Company Confidential 8 TARGET - May 15, 2015 v1.2
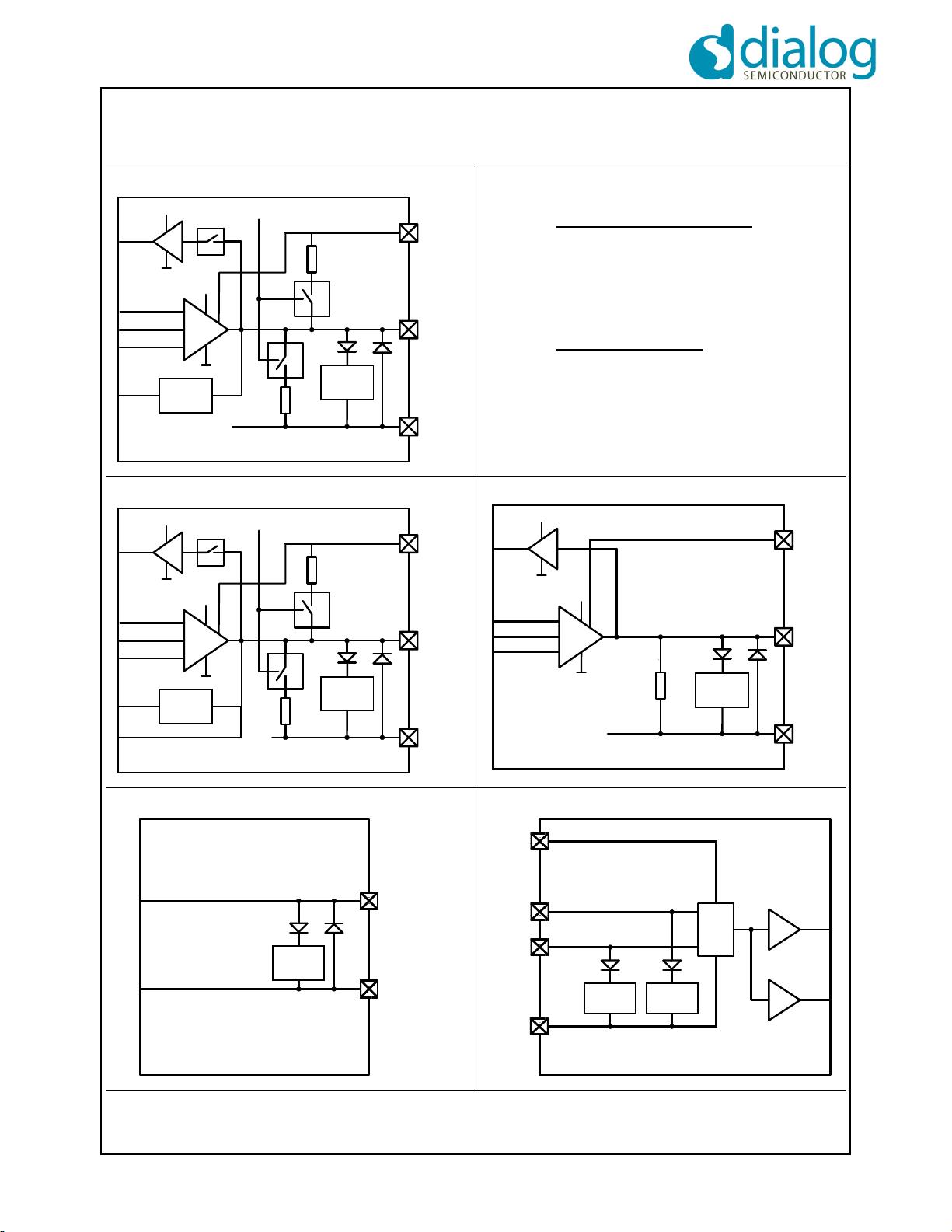
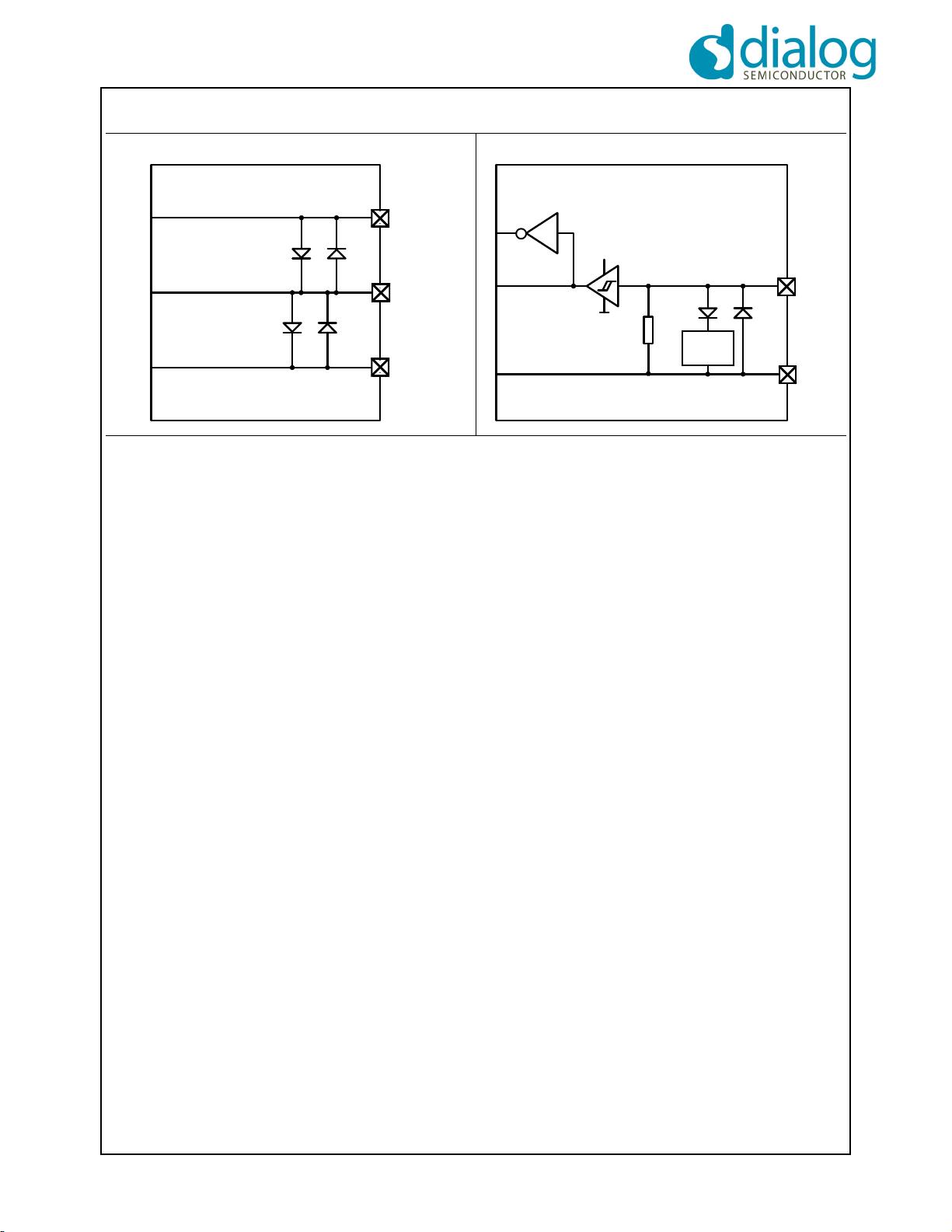
Table 3: Pin type definitions
Digital PADs for GPIO w/wo analog
40k +/-30%
PIN
VSS
40k
+/-30%
V33
VDD1V8
GND
Px_MODE_REG[PUPD]
active ESD
protection
Open drain
Output Enable
Data
VSS
VDD
VDD1v2
Analog
ESD
protection
Digital Input/Output open drain
BP = Back drive protected up to 3.45 V
Digital/analog PAD I/O configurations:
DO:
DI:
DIO:
Digital Input
Digital Output
Digital Input/Output
PU: Fixed pull-up resistor
Pullup/pulldown extensions:
PD: Fixed pull-down resistor
SPU: Switchable pull-up resistor
SPD: Switchable pull-down resistor
DIOD:
Analog input
AO: Analog Output
AIO: Analog Input/Output
AI:
VDDIO_xxx PAD supports 1.8 V or 3.3 V
Digital PADs for USB PHY with GPIO
40k +/-30%
PIN
VSS
40k
+/-30%
V33
VDD1V8
GND
Px_MODE_REG[PUPD]
active ESD
protection
Open drain
Output Enable
Data
VSS
VDD
VDD1v2
Analog
ESD
protection
USB PHY
Digital PADs for QSPI
PIN
VSS
V12
40k +/-30%
GND
Data
QSPI_DRV[1:0]
QSPI_SLEW[1:0]
VSS
V12
CLK_AMBA_REG[QSPI_ENABLE] = 1
active ESD
protection
VDDIO
active ESD
protection
VSS
Analog PIN
PAD A1
active ESD
protection
XTAL1
GND
PAD A2
VDD
active ESD
protection
Xtal
osc
XTAL2
剩余60页未读,继续阅读
2015-02-03 上传
2022-07-15 上传
2023-04-28 上传
2022-04-06 上传
2021-05-03 上传
2022-09-24 上传
2020-05-13 上传

bluesnail1986
- 粉丝: 5
- 资源: 76
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
