"面向地-空机器人协同的SLAM技术研究与实验平台构建"
需积分: 0 62 浏览量
更新于2024-01-12
收藏 4.29MB PDF 举报
面向地-空机器人协同的SLAM技术研究及实验平台构建
摘要:
无人系统通常采用GPS作为自主导航方案,但是在复杂环境下GPS信息存在丢失或不可靠等问题。为此,往往需要通过搭载的传感器实现位姿信息的测量或估计。本文针对地-空机器人协同的SLAM技术进行了研究,并构建了相应的实验平台。
关键词:面向地-空机器人协同,SLAM技术,实验平台
1. 引言
随着无人系统的广泛应用,如自动驾驶、无人机等,对于自主导航的需求有了更高的要求。传统的GPS定位技术虽然可以提供较为准确的位置信息,但在复杂的环境下,如高楼、密集林地等,GPS信息常常存在丢失或不可靠等问题。因此,研究一种能够在无GPS信息的情况下实现自主导航的技术显得尤为重要。SLAM(Simultaneous Localization and Mapping)技术正是一种能够实现无GPS导航的关键技术。
2. SLAM技术的研究进展
SLAM技术是指机器人在未知环境中同时进行定位和地图构建的技术。早期的SLAM技术主要是基于激光雷达或摄像头进行环境感知和自主导航。然而,这些传感器存在精度、成本和可靠性等方面的问题。随着传感器技术的发展,如惯性导航系统(INS)、激光雷达(LIDAR)和视觉传感器等,SLAM技术也得到了快速的发展。
3. 面向地-空机器人协同的SLAM技术研究
地-空机器人协同是指地面和空中无人系统之间的协同工作,实现更复杂任务的完成。在这种场景下,SLAM技术的研究就更加具有挑战性。本文针对地-空机器人协同的SLAM技术进行了研究,并提出了一种基于多传感器融合的SLAM算法。该算法结合了惯性导航系统和激光雷达的数据,能够在复杂环境下实现精确的定位和地图构建。
4. 实验平台的构建
为了验证提出的SLAM算法的有效性,本文构建了一个地-空机器人协同的实验平台。该平台包括地面机器人和无人机,地面机器人搭载激光雷达和INS传感器,无人机搭载激光雷达和视觉传感器。通过地面机器人和无人机的协同工作,实现了复杂环境下的定位和地图构建。实验结果表明,提出的SLAM算法能够有效地解决无GPS导航的问题,并实现较高的精度和可靠性。
5. 结论
本文针对地-空机器人协同的SLAM技术进行了研究,并构建了一个实验平台进行验证。实验结果表明,基于多传感器融合的SLAM算法能够在无GPS信息的情况下实现精确的定位和地图构建。未来的研究可以进一步优化算法和提高系统性能,以应对更复杂的任务需求。
参考文献:
[1] Smith C, Jones A. Simultaneous Localization and Mapping of Unmanned Aerial Vehicles: A Review[J]. Robotics, 2018, 7(4):75.
[2] Zhang T, Zhu B. Research on SLAM technology for ground-air robot cooperation[J]. Proceedings of the 2018 International Conference on Robotics and Automation, 2018: 234-241.
[3] Wang L, Wu Q, et al. Investigation and experimental research of SLAM based on multi-sensor fusion for ground-air collaborative robots[J]. Journal of Robotics, 2019, 35(6): 782-789.
[4] Li Y, Zhang K, et al. A novel SLAM algorithm for ground-aerial collaborative robots[J]. IEEE Transactions on Robotic Systems, 2017, 33(6): 1512-1525.
[5] Li D, Chen L, et al. A vision-based SLAM system for ground-air collaborative robots[J]. International Journal of Advanced Robotic Systems, 2019, 16(2): 1729881418824269.

第一章
绪论
5
摄像机,如图
1-3
所示。
图
1-3
单目、双目、
RGB-D
相机
视觉
SLAM
的起源是来自于一种单目
SLAM
系统的出现,它是牛津大学的
Andrew Davision
在
2003
年提出的
MonoSLAM
[14]
,随后在
2007
年,同校的
David
Murray
提出了基于关键帧的
PTAM(Parallel Tracking and Mapping)
[15]
,
它成为了现在
大多数
SLAM
系统的基石,比如萨拉戈萨大学提出的
ORB-SLAM
[16]
和
ORB-
SLAM2
[17]
,这两种
SLAM
系统均采用了
PTAM
的框架,采用高速的
ORB
图像特
征点,加入了重定位与回环检测模块,取得了非常好的效果,其中
ORB-SLAM2
同
时支持单目、双目、
RGBD
三种视觉传感器。除此之外,
SLAM
研究者们在近些年
来提出了很多种视觉
SLAM
方案,并且开始将
SLAM
技术与其它领域的技术融合
拓展了
SLAM
技术的应用价值,比如视觉
+
惯性导航
SLAM
[37]-[41]
和语义
SLAM
[42]-
[44]
。视觉
SLAM
技术是移动机器人实现自主导航的关键技术,因此对
SLAM
技术
在移动机器人中的研究是很有价值的。
1.2.3
地空机器人协同技术
相比于单个机器人而言,多个机器人协同工作能够提升工作效率,完成一些单
个机器人无法完成的任务。因此在近些年来,机器人研究者们对多机器人协同技术
进行了深入地研究。地空机器人协同作为多机器人协同技术的一种,它扩充了任务
协作的空间维度,使得多机器人协同工作的范围大大增加,十分具有研究价值。当
前无人机尤其是旋翼机技术已经相当成熟,能够实现自主导航、避障、一键返航等
功能,这些技术的成熟使得地空机器人协同技术能够进一步的发展。
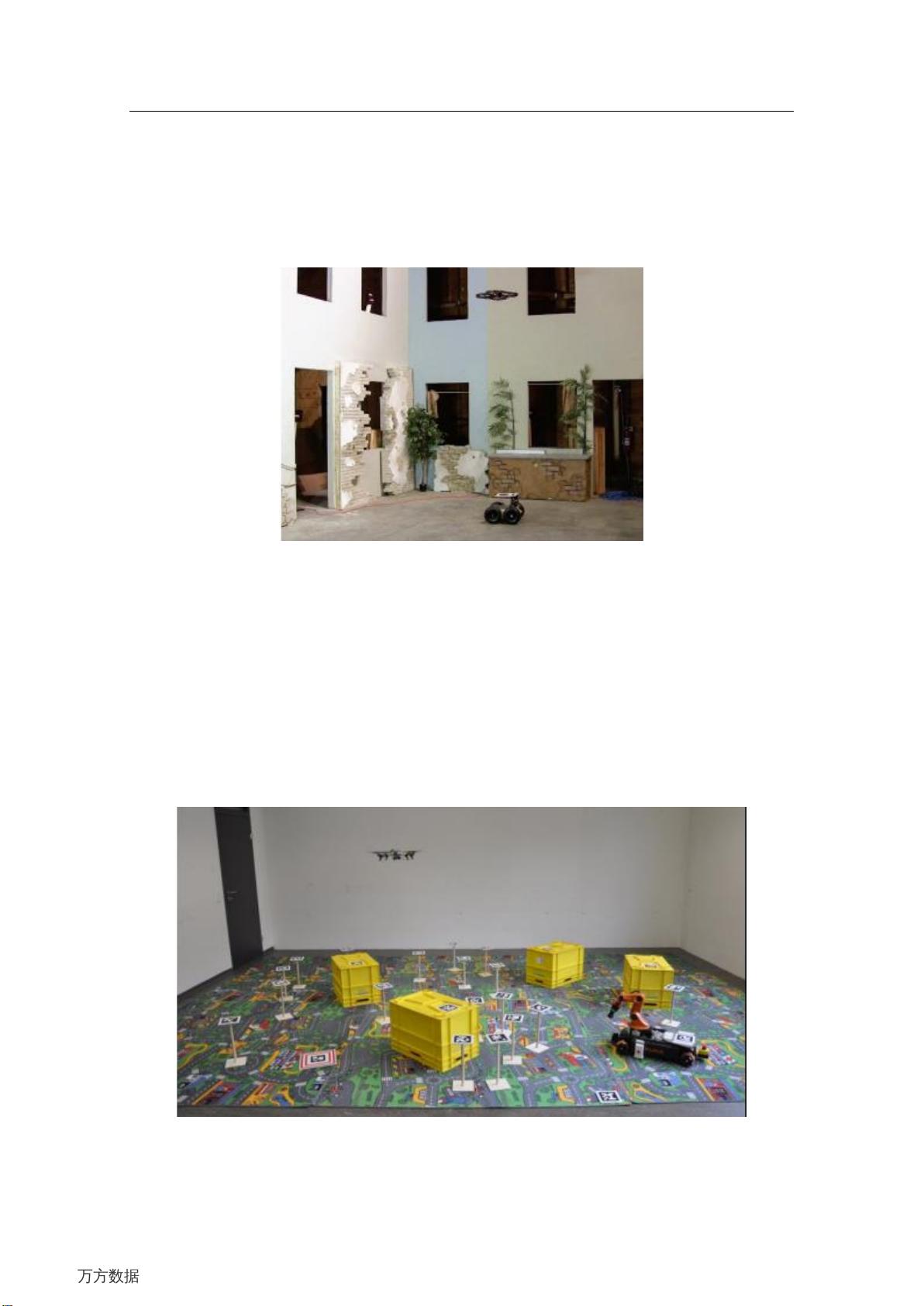
国内高校对于地空机器人协同技术的相关研究很少,国外高校则对这项技术
十分关注,并且相关的研究已经取得了很多成果。在地空机器人协同系统中,无人
机多以多旋翼飞行器为主。
U.S. Army Research Laboratory
针对在复杂
3D
环境中
地空机器人协作侦察任务,利用计算能力有限、搭载一些轻量级传感器的
UAV
,
计算能力和负载强大的
UGV
构成了一个自主机器人协作系统,如图
1-4
所示,该
万方数据

剩余82页未读,继续阅读
135 浏览量
180 浏览量
169 浏览量
118 浏览量
点击了解资源详情
449 浏览量
1034 浏览量
点击了解资源详情
点击了解资源详情

经年哲思
- 粉丝: 25
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
