基于模糊控制的管道机器人机构设计与控制研究
版权申诉
178 浏览量
更新于2024-06-23
收藏 1.24MB DOC 举报
管道机器人机构设计与控制
本文主要讨论了管道机器人机构设计与控制中的关键技术问题,包括非完整约束系统的运动学模型、非线性控制、模糊控制等。下面是对这些技术的详细解释:
1. 非完整约束系统的运动学模型
非完整约束系统的运动学模型是指在运动中,履带式机器人的滑动问题比较严重,建立精确的运动学模型比较困难。这种问题的解决需要使用非线性控制方法,但是这些方法对非完整约束系统的应用受到限制。
2. 非线性控制
非线性控制是指对非线性系统的控制,包括非线性系统的稳定性分析和控制律设计。非线性控制方法可以分为两类:一类是基于模型的控制方法,另一类是基于非模型的控制方法。然而,对于非完整约束系统,基于模型的控制方法不可行,因为建立精确的运动学模型比较困难。
3. 模糊控制
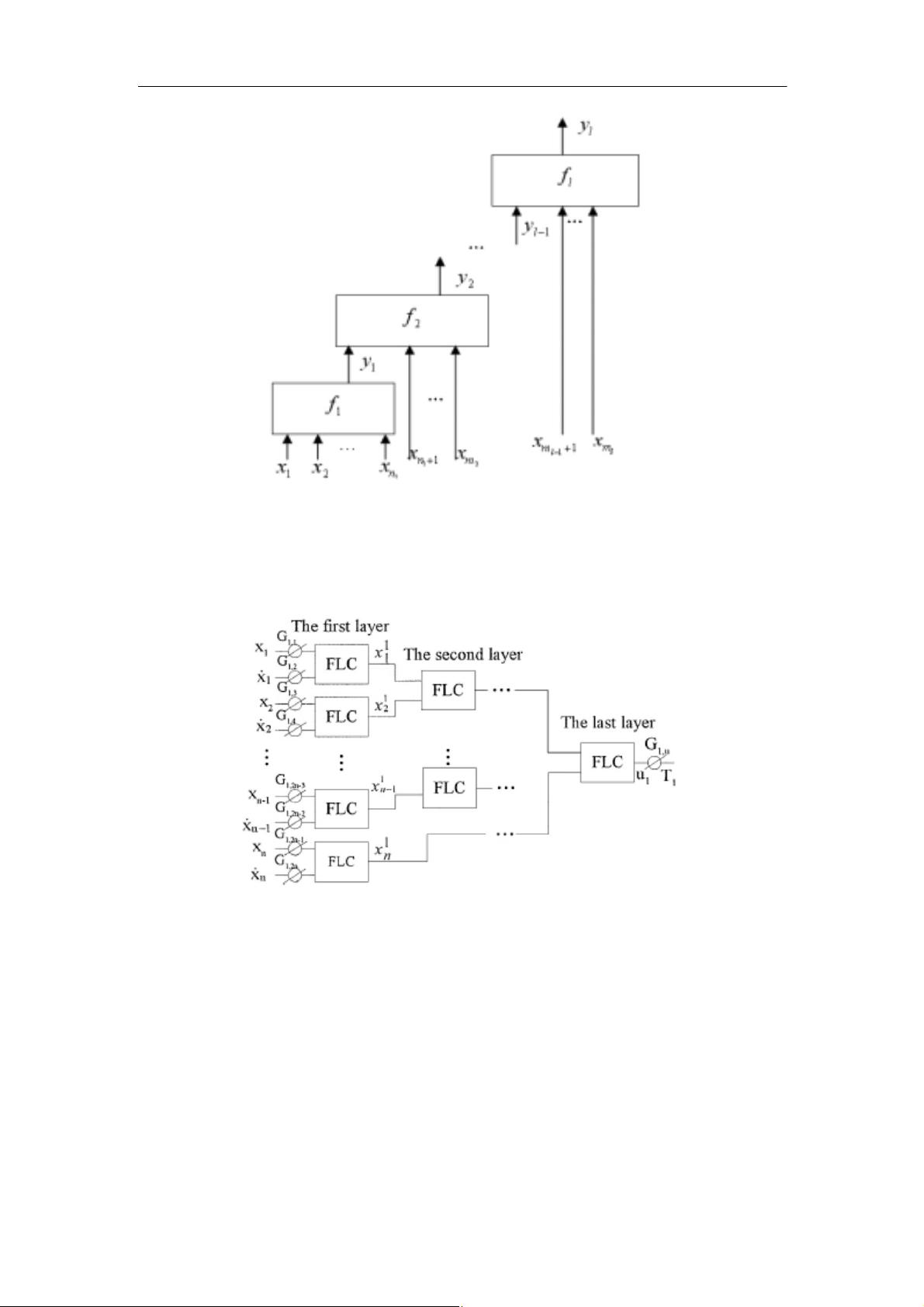
模糊控制是指基于专家的知识和操作者的经验建立模糊控制模型的控制方法。模糊控制方法可以应用于非完整约束系统的控制,包括参数自调整、规则自调整和论域自调整等。然而,模糊控制方法也存在一些问题,如控制规则和隶属函数不好确定,计算量非常大等。
4. 模糊数学理论
模糊数学理论是指基于模糊集合和隶属函数概念的数学理论。模糊数学理论可以用来描述事物的模糊性,例如大和小、高与矮、快与慢等等。模糊数学理论的提出是为了解决经典数学在描述模糊现象时的不足。
5. PIPE机器人机构设计
PIPE机器人机构设计是指对管道机器人的机构设计,包括机械设计、电子设计和软件设计等。PIPE机器人机构设计需要考虑非完整约束系统的运动学模型、非线性控制和模糊控制等技术问题。
6. 控制理论
控制理论是指对系统的控制,包括稳定性分析、控制律设计和系统优化等。控制理论需要考虑非完整约束系统的运动学模型、非线性控制和模糊控制等技术问题。
管道机器人机构设计与控制是一项复杂的技术问题,需要考虑非完整约束系统的运动学模型、非线性控制、模糊控制等技术问题。解决这些技术问题需要使用多种技术方法,包括模糊数学理论、非线性控制方法和 PIPE机器人机构设计等。

- 41 -
剩余46页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-07-11 上传
2021-09-16 上传
2021-09-16 上传
2023-07-11 上传
2023-07-11 上传
2023-07-15 上传

omyligaga
- 粉丝: 87
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
